Après des années d'observations avec une monture équatoriale, je ne pouvais pas me résoudre à observer avec un suivi manuel. A mon goût, le moteur est non seulement un instrument de confort très important mais aussi un moyen efficace pour percevoir de fins détails grâce à une concentration sur l'objet observé et non sur son suivi. Deux possibilités s'offraient à moi, la table équatoriale ou la motorisation en altazimutal. Bien sûr, les deux solutions peuvent être fabriquées soi même ou être achetées toutes faites. On trouve les tables équatoriales chez equatorial platforms ou John Lightholder peut en fabriquer sur mesures. Si on souhaite la fabriquer on peut aller voir la réalisation de Jean Marc Becker qui est un modèle d'ingéniosité, comme tout ce qu'il réalise d'ailleurs. La motorisation en altazimutal peut se fabriquer si on est compétent en électronique et que l'on possède un ordinateur portable, sur le site de Mel Bartels (une traduction du système de motorisation est faite par Francis Tisserant: http://ftissera.free.fr/Webmel/altaz.html ), on trouvera tous les éléments nécessaires ainsi que bien d'autres choses au sujet de la fabrication des télescopes, Olivier Lobet Thierry Restout et Cyrille Tessier développent actuellement un projet de motorisation et pointage automatique qui promet énormément. J'ai opté pour le système Tech 2000 qui offre l'avantage d'être évolutif et compact une fois installé. L'achat aux USA entraîne 7% de frais de douane et 19,6% de TVA, il ne faut pas oublier que ces taxes s'appliquent aussi sur le port. Le système est livré avec une notice d'utilisation et une notice d'installation qui semble complète car très dense, mais certains points délicats ne sont pas du tout abordés. |
|
Le système se présente sous deux versions, celle de base, le Dob Driver (une traduction du mode d'emploi a été faite par Stéphane Fouchereau de la SAT, tahiti) et la version plus élaborée qui nécessite un ordinateur portable, le Roboscope. Le Dob driver est composé d'une raquette de pilotage et des moteurs. Le principe d'utilisation est très simple, il suffit de suivre l'objet voulu en actionnant les boutons de la raquette pendant quelques instants pour que le calculateur intégré envoie les ordres de suivi aux moteurs. Ce système de base peut être tout à fait intéressant pour celui qui possède déjà une aide au pointage ou pour celui qui désire continuer à faire du "star hopping" tout en ayant un suivi de l'objet. Le roboscope est vendu par Tech 2000 pour gérer la motorisation. Il permet la calibration des pas des moteurs, le réglage de "backlash", autrement dit le jeu venant des moteurs ainsi que de la monture, l'initialisation sur deux étoiles puis la fonction "goto" en utilisant des catalogues (Messier, NGC, IC, King, Caldwell, Utilisateur) ou en entrant soi-même les coordonnées. C'est un logiciel sous DOS qui ne nécessite pas une machine puissante pour fonctionner (un 386sx fait l'affaire), la liaison se fait par le port parallèle grâce à un long câble. J'utilise pour ma part un portable Dell320N+, c'est un 386 dont l'éclairage de la matrice était HS, Thierry m'a installé des LED vertes qui donnent un éclairage idéal dans la nuit, ce type de portable peut se trouver à petit prix dans des magasins d'occasion style Cash Converters. Un document en anglais décrit certains problèmes qui peuvent diminuer la précision du logiciel autant en pointage qu'en suivi. La précision de pointage du logiciel est donnée pour être proche du centième de degré ! Bien entendu, cela ne tient pas compte des imprécisions mécaniques. L'utilisation du logiciel est très simple pour toute personne sachant lire l'anglais ou pouvant être guidée pendant quelques temps dans la prise en main. Nous avons demandé les sources ou au moins les fichiers textes pour pouvoir en faire des traductions à la disposition des utilisateurs francophone, mais hélas la réponse de l'éditeur a été négative. J'ai élaboré un fichier d'étoiles repères, constitué d'étoiles brillantes réparties uniformément sur la voûte céleste, cela permet un recentrage précis si le besoin s'en fait sentir, écrivez moi et je vous l'envoie ! (6Ko) ou chargez le directement ici. Charles Starks nous présente une alternative au montage classique du dob driver sur la page "Montage Dob driver alternatif". On trouve aussi une très bonne page sur le Dobdriver à cet endroit : http://www.rivastro.org/rasddr2.htm Avant toute chose, il faut paramétrer la fréquence et le délai de répétition des touches du clavier. Si la fréquence n'est pas assez élevée et le délai trop élevé, les moteurs auront un fonctionnement non linéaire lors de l'initialisation sur deux étoiles, Tech 2000 indique que cela n'influence pas la qualité de pointage et d'initialisation, mais notre expérience a démontré l'inverse. Si on a affaire à un ordinateur dans lequel le BIOS ne permet pas de régler les vitesses et délais, il faut intégrer la ligne suivante dans l'AUTOEXEC.BAT : MODE CON: RATE=32 DELAY=4 . |
|
Les premières tentatives d'utilisation ont été des échecs car la notice n'aborde pas sérieusement la partie purement mécanique de l'installation. Tout d'abord, le système est livré avec des roulettes en acier sans roulements, elles sont complètement inutilisables autant en azimut qu'en altitude. Plusieurs mois de mise au point et d'essais nous ont permis de traiter tous les points critiques et d'arriver à un résultat très satisfaisant, c'est à dire un bon suivi et un pointage quasi parfait en fonction goto. La partie la plus délicate concerne l'azimut. Il faut avoir une base plane et indéformable pour servir de chemin de roulement au moteur et aux roulettes. Après des essais de différents matériaux, nous avons opté pour une plaque d'aluminium de 1,5mm d'épaisseur collée (à la colle néoprène) sur la base, elle même composée de contre-plaqué de forte épaisseur pour Thierry (54mm) et d'une plaque de contre-plaqué renforcée avec des cornières en aluminium entre les pieds pour moi. La pression importante occasionnée par les moteurs et les roulettes ont tendance à faire fléchir la base quand la pression s'exerce entre les pieds de la base, il est crucial que cette flexion soit la plus minime possible. |
|
Une base en composite, polystyrène et contre-plaqué peut donner le même résultat mais il faut utiliser de fortes épaisseurs de polystyrène, l'avantage réside dans la légèreté plus grande mais l'épaisseur et donc l'encombrement sera plus grand. L'alu de surface se marque au passage de la molette tractrice mais ne se coupe pas comme le fait le formica. |
|
Thierry nous a fabriqué des roulettes avec des roulements de Roller. Les roulettes sont insérées en force dans un découpe faite à la défonceuse. La précision de la découpe est importante car lors de l'installation du moteur, il faut absolument que la base et la fourche soient parallèles. Il va de soi qu'une utilisation manuelle ne nécessite pas cette précision ni ces roulettes, de simples patins en téflons fixés sur la base conviennent parfaitement. |
|
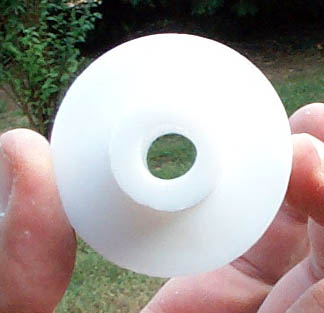
| Sur la photo ci dessus, on peut noter un des quatre patins en téflon circulaire fixé à l'intérieur de la fourche pour guider une éventuelle dérive de la boîte à miroir. |
Le pivot est aussi un point crucial qui n'est pas abordé dans la documentation de Tech2000, il faut absolument que le jeu soit minime tout en évitant le plus possible les frottements qui empêchent le bon comptage des pas moteurs. Tout d'abord nous avons utilisé un palier en alu avec une tige en inox mais, les résultats les meilleurs ont été amenés par un palier en téflon et la tige inox lubrifiée à la graisse téflon (cette graisse n'est pas toujours facile à trouver, j'ai pu m'en procurer chez Castorama, les propriétés de tenue dans le temps et de résistance aux différences de températures sont remarquables). |
|
Il faut veiller au bon parallélisme de la boîte à miroir et de la fourche pour permettre au tube optique de monter et descendre bien verticalement, le logiciel peut compenser une erreur avec une fonction de recentrage qui lui permet de faire la moyenne mais, il est clair qu'une bonne orthogonalité de l'ensemble facilite grandement le travail et permet une bien meilleure précision de pointage. Le moteur d'altitude pose moins de problèmes, nous avons utilisé un chant granuleux pour les tourillons et des patins en téflon classiques, en respectant la règle d'un kilo par cm2 de téflon. Par la suite Thierry a employé des roulements de rollers pour remplacer le téflon, cela permet de supprimer tout effet d'adhérence en donnant une réponse instantanée aux sollicitations du moteur. Par contre le chant en mélamine a tendance à s'effriter sous l'action de la roue tractrice, il se désagrège et cela amène un bourrage de la roue tractrice. Nous pensions remplacer le chant par une bande d'aluminium mais les difficultés de mise en oeuvre (coupe rectiligne du chant, cintrage sans faire de "plats", collage et fixation toujours délicats avec l'aluminium) nous ont amené à chercher un autre matériau. Sur les conseils d'un mécanicien de précision nous nous sommes dirigé vers l'ertalon (ou polyamide ou PA6, voir liste des matières plastiques). Nous l'avons trouvé sous forme de plaque de 1m x 2m et 1mm d'épaisseur pour un prix de 330F. C'est un matériau souple mais extrêmement résistant à l'arrachement et à la compression, le contact avec la roue d'entraînement en inox crénelé est parfait. Attention cependant, il y a une certaine adhérence avec le téflon qui n'en fait pas un bon matériau pour un fonctionnement manuel, sur le 406 de Thierry qui a des roulements en altitude cela ne pose aucun problème, sur mon 508 avec les patins téflon j'ai du utiliser la polyamide uniquement sur le tourillon du moteur, l'autre gardant son chant mélaminé. Pour couper des bandes de polyamide, nous avons utilisé un gros cutter guidé par une règle de maçon. Première surprise, après la coupe du premier chant, la lame du cutter était complètement émoussée, la polyamide a une résistance exceptionnelle. Le collage à la néoprène est facile et fiable, nous conseillons malgré tout la néoprène gel qui permet un positionnement précis du chant sans bavure de la colle; il est aussi plus facile de coller le chant avant que la colle oblige à un collage "contact", quand elle est encore "molle" le positionnement est plus simple, il suffit de tendre le chant en attendant la prise de la colle. Les essais sont vraiment concluants, le moteur réagit instantanément avec une inertie très réduite par rapport au chant en mélamine. Lors d'une mauvaise manipulation, j'ai poussé le tube alors que le moteur n'était pas débrayé, j'ai été très surpris de constater que la polyamide n'était même pas rayé par la roue inox ! Nous avons découvert aussi un effet inattendu à ce matériau, l'isolation phonique. Jusqu'à présent le bruit du moteur se propageait dans le tourillon et venait s'amplifier dans la caisse primaire, la polyamide empêche cette propagation du son et rend les moteurs encore plus silencieux. Nous n'avons trouvé que des avantages à l'utilisation de ce matériau, à tel point que nous allons faire un essai pour l'employer sur la base, il ne devrait pas y avoir d'amélioration par rapport à l'aluminium quant à la motorisation, mais le plus en isolation phonique n'est pas négligeable et nous allons voir s'il est possible d'améliorer encore cette partie (d'origine le système Tech 2000 n'est pas très bruyant mais il est toujours plus agréable d'avoir un bruit minimum pour bien profiter des merveilles célestes).
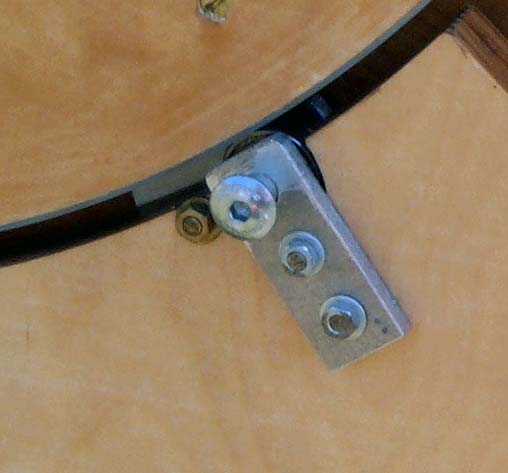
Fixation d'un roulement d'altitude
Une fois toutes ces améliorations mécaniques faites, le pointage automatique devient très bon. Les objets sont quasiment toujours au centre du champ quelle que soit la distance de pointage. Une seule réserve pour les pointages très bas sur l'horizon, l'erreur de pointage est souvent plus importante mais il faut certainement voir du côté de l'équilibrage et de la réfraction atmosphérique pour trouver les causes de cette erreur résiduelle. De même, il ne faut pas oublier de recentrer le dernier objet visé avant de repartir vers un autre, faute de quoi le pointage sera défaillant. Le suivi devient doux, sans à coups, de forts grossissements peuvent être utilisés sans que l'on perçoive les pas des moteurs. Attention cependant, à bien veiller au paramétrage de la vitesse maximale des moteurs avec le dob driver avant d'utiliser efficacement le roboscope, ce point est crucial !! Pour permettre une utilisation aisée du portable Thierry a fabriqué un abri solidaire du télescope, l'ensemble suit la rotation de l'instrument et évite d'avoir de multiples fils au sol. Les risques de casse sont beaucoup plus importants dès que des fils traînent par terre, n'importe qui peut s'entraver et entraîner la chute de matériel. Une extension de pavé numérique permet de faire des recentrages en utilisant les flèches directionnelles, cela évite d'avoir à transporter le portable en haut de l'escabeau . |
|
Le portable est bien protégé de l'humidité et du froid par un plastique. L'ensemble s'enlève facilement en deux minutes. |
|
|