|
Le 560 dont je disposais jusqu'ŗ il y a peu de temps ťtait motorisť ŗ l'aide d'une plate-forme fabriquťe par John Lightholder et m'a apportť une grande satisfaction. Lorsque j'ai commencť ŗ ę travailler Ľ sur le projet du 800 mm, il m'a paru indispensable de motoriser l'instrument. Premier choix, opter pour une plate-forme ťquatoriale. ProblŤme, Cela ajoute environ 140 mm ŗ un instrument dťjŗ relativement haut (l'oculaire ťtait ŗ 2,8 m environ au zťnith). Seconde solution, une motorisation Altaz, problŤme elles sont souvent compliquťes ŗ mettre en oeuvre ou nťcessitent l'utilisation d'un PC portable, ce que je me refuse ŗ avoir pour des raisons de consommations d'ťnergie, de fiabilitť et d'ťclairage. J'ai donc recherchť une solution qui soit la plus rapide et pratique ŗ mettre en oeuvre. Depuis quelques annťes, la gamme des dobsons Starmaster est ťquipť d'une motorisation GOTO mais elle n'est pas commercialisťe en dehors d'une configuration complŤte dobson Starmaster + Skytracker. En surfant sur l'Internet j'ai vu une solution proposťe par Gary Myers, le Servo Cat. Cette solution est dťclinťe en plusieurs versions pour les diffťrents type de montures dobson, ou ťquatoriale, avec ou sans les moteurs, bref, difficile de ne pas y trouver son bonheur. Dans cette palette de solutions, j'ai retenu la version Servocat Sky car elle ne nťcessite pas de PC portable.
raquette du servocat
Composition du kit Dans la configuration choisie, le Servocat Sky est composť d'un boitier ťlectronique, de deux servos moteurs et de leur boite de rťduction respective, d'une raquette de commande. Il faut ajouter des cercles digitaux de type Skycommander ou ArgoNavis et leurs encodeurs. De par la taille de sa base, c'est la solution ArgoNavis que j'ai retenue.
boitier ArgoNavis
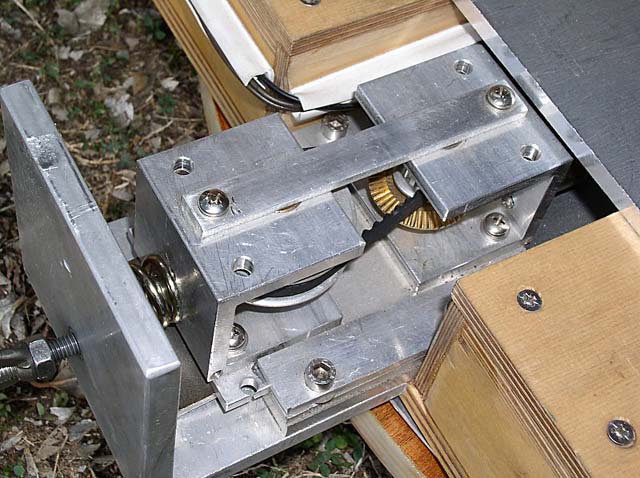
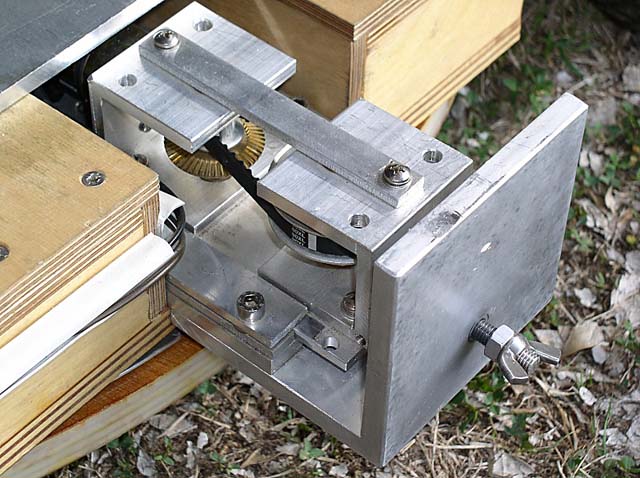
entraÓnement d'azimut
entraÓnement d'azimut
entraÓnement d'azimut
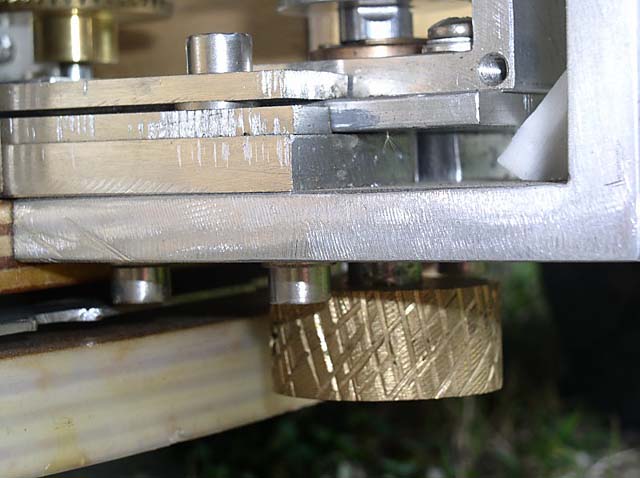
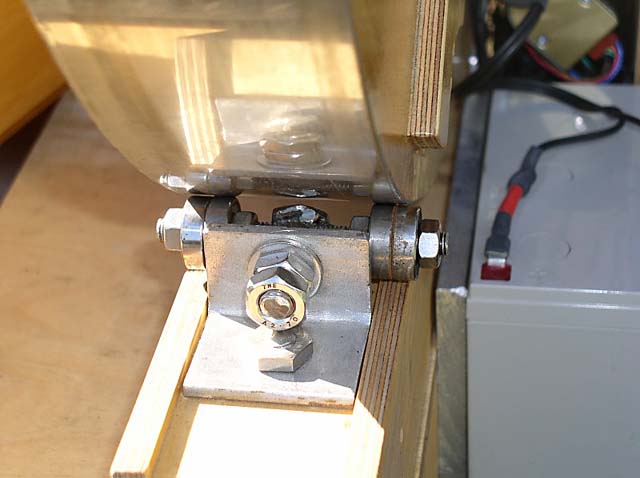
entrainement d'altitude
roulements ŗ billes d'altitude
Principe de fonctionnement Dans le principe, le boitier Servo Cat interroge les cercles digitaux sur la position et se recale en fonction des paramŤtres qu'il reÁoit. Un systŤme de ce type a un avantage certain sur les autres solutions : les encodeurs indiquent toujours la position de l'instrument avec prťcision. Il n'y a pas de problŤme en cas de glissement ou de patinage car le servocat ne compte pas les pas des moteurs pour retrouver sa position, il se cale sur l'ArgoNavis. La prťcision du pointage ne dťpend que de la prťcision de l'alignement des cercles digitaux. A l'usage, cette solution est trŤs pratique. La vitesse est particuliŤrement impressionnante. Le 800 mm ťtant assez imposant, j'ai prťfťrť dans un premier temps limiter la vitesse de dťplacement ŗ environ 4 degrťs/s. Le niveau sonore en goto n'a absolument rien de dťsagrťable, bien plus faible que nombre d'autres solutions. En suivi, les moteurs sont quasi inaudible. C'est un grand confort et prťserve ŗ la fois les oreilles de l'utilisateur et celle des autres observateurs !
face avant du servocat
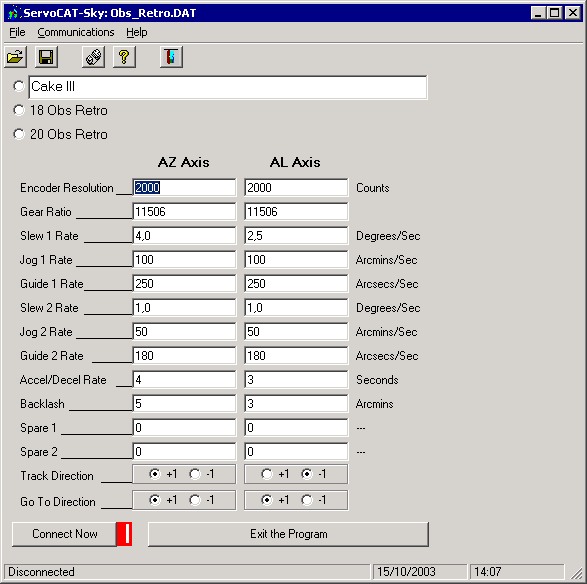
Paramťtrage Les dťplacements se font gr‚ce ŗ un paramťtrage effectuť par un petit utilitaire livrť avec le ServoCat.
Bruit et consommation Autre bon point, la consommation ťlectrique est trŤs faible. J'utilise une petite batterie Yuasa de 12 Ah et elle permet d'observer plus d'une nuit complŤte. Il est possible d'alimenter l'argonavis avec la mÍme batterie, cela fera l'objet d'une petite modification dans l'avenir.
alimentation ťlectrique
Qualitť du service La qualitť du service proposť par Gary Myers est excellente. Il essaye vraiment de trouver une solution si un problŤme se prťsente et ne mťnage pas ses efforts. C'est particuliŤrement apprťciable lorsque l'on a affaire ŗ une solution technique de pointe. Quelques conseils d'utilisation Il faut bien comprendre que la prťcision du servocat est dťpendante de la prťcision de l'alignement des cercles digitaux. Il faut donc veiller ŗ rťaliser un alignement de qualitť. De mÍme, le second facteur affectant la position des pointages et la qualitť du suivi est le bon paramťtrage des ratios des moteurs. Dťs que le solution est opťrationnelle, il est bon de se pencher sur la prťcision des nombres entrťs dans le logiciel de paramťtrage. Pour dťterminer les ratios prťcis, il suffit d'utiliser un petit c‚ble commercialisť par Gary en option et de suivre une procťdure. Cette procťdure trŤs dťtaillťe permet d'obtenir des ratios quasiment parfaits et ainsi un suivi quasiment sans erreur. J'espŤre pouvoir tester cela trŤs bientŰt.
face arriŤre du servocat
Lors du montage sur un dobson, il est possible de choisir entre deux solutions, un entraÓnement ŗ friction ou un entraÓnement par c‚ble. La friction, basťe pour l'altitude sur la masse de l'instrument, est plus facile ŗ rťaliser mais moins fiable car elle dťpend ťtroitement de la qualitť de l'ťquilibrage du tube optique. L'entraÓnement par le c‚ble (solution retenue par Gary Myers pour ťquiper les instruments de type Obsession) est d'une mise en oeuvre plus dťlicate mais assure un suivi de meilleure qualitť. Evolution Le ę bios Ľ du systŤme peut Ítre mis ŗ jour lorsque des ťvolutions apparaissent. Il est prťvu dans l'avenir, d'ajouter le contrŰle d'un 3ieme moteur destinť ŗ obtenir une dťrotation du champ afin de pouvoir rťaliser des poses photo ŗ volontť. De mÍme l'autoguidage ne sera pas oubliť.
|
|
|