

le controleur DMFC de Pegasus Astro

il y a différents moyens de gérer un moteur de mise au point :
- soit il comporte le système de contrôle comme le FocusCube 2 Pegasus Astro ( PEG-FC2-UNIV ) ou le sesto senso 2 .
il sera donc facile de gerer ce moteur de mise au point directement par une alimentation 12V et un cable USB 2
- il n'en a pas comme mon Moonlite V2 ou comme ceux dédiés aux SC que l'on peut trouver dans cette marque (les PEG MFkv et les PEG FC )
dans ce cas il vous sera nécessaire de vous équiper d'un "contrôleur" comme le système Dual Motor Focus et d'un cable série propre au moteur .
ce Dual Motor Focus permet de gérer soit des moteurs pas à pas (de type unipolaire ou bipolaire) soit des moteurs à courant continu DC (type PWM). d'ou son nom "Dual Motor"
ce boitier est fournit d'un câble USB 2 et d'une sonde thermique.

on peut gérer ce moteur directement sans pc en actionnant le bouton rotatif d'un côté ou de l'autre . une raquette aurait été préférable !
sa led en façade permet de connaitre la vitesse de mise au point
- elle est verte : la vitesse est maximale
- elle est jaune : la démultiplication est paramétrée sur 1/10ème
ce moteur ne possède pas de fixation propre il vous faudra donc vous doter d'une Platine de fixation A-Plate Pegasus ou alors trouver une astuce pour le fixer sur votre setup
pour ma part j'ai utilisé du double face pour le coller sur le moteur Moonlite

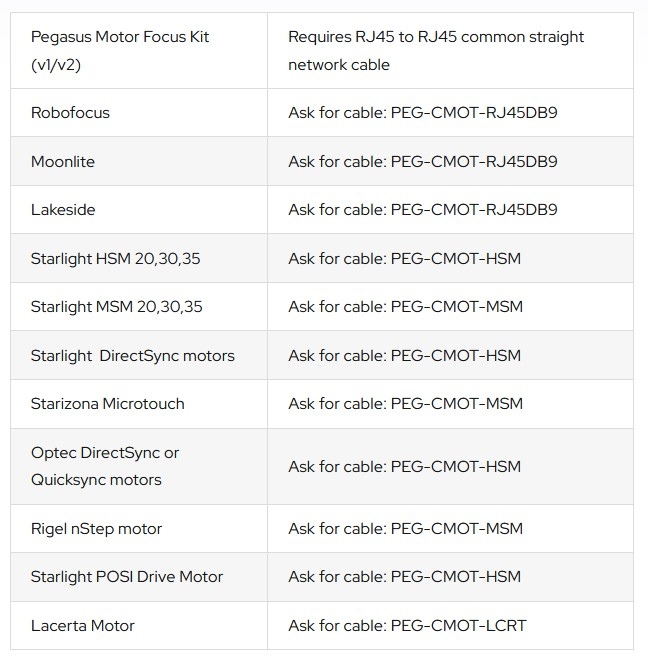
le raccordement entre le contrôleur et le moteur de mise au point sera par l'achat d'un câble série spécifique a chaque moteur
a partir de là cette étape de vérification il vous faudra télécharger les drivers de cet appareil en bas de cette page ( lien ) et les installer sur votre portable
vous pourrez le gérer depuis l'applicatif UNITY que j'ai décrit dans ce lien
PS : assurez vous que le PO est en position rétracté . cela aura son importance pour régler les valeurs mini et maxi du moteur de mise au point !
lancez l'applicatif pour arriver sur le menu général de cette interface UNITY

cliquez sur celui ci et vous arrivez dans le module du DMFC.

la premier chose à faire est de choisir le modèle de moteur qui vous sont proposés dans l'onglet "Motor Profile"
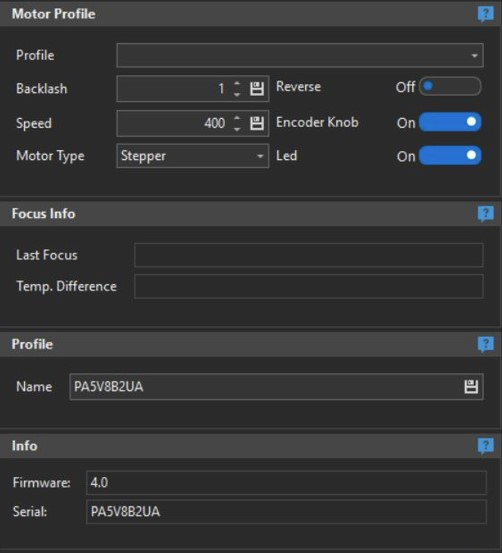
PS : A vous de paramétrer les différentes valeurs annexes suivant le décalage de backlash ou de température
le reverse doit etre à OFF pour ne pas forcer sur le PO car il partirerais en sens inverse !
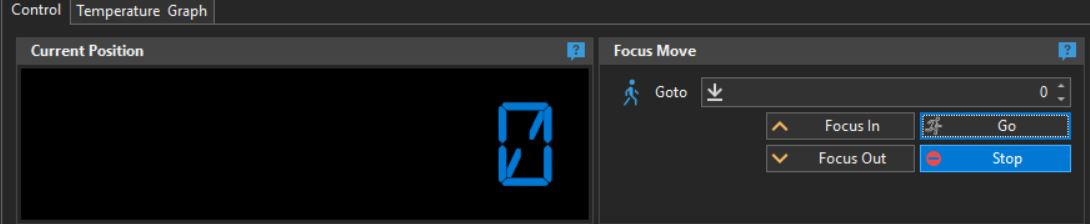
sur l'onglet "Current Position" vous devez avoir la valeur 0.
essayer de le faire bouger par l'onglet "Focus Move" pour vérifier son fonctionnement
lorsque vous avez vérifié ce point paramétrer les valeurs de positionnement maximale et minimale sur l'onglet "Motor limits" et enregistrer sur la disquette la valeurs

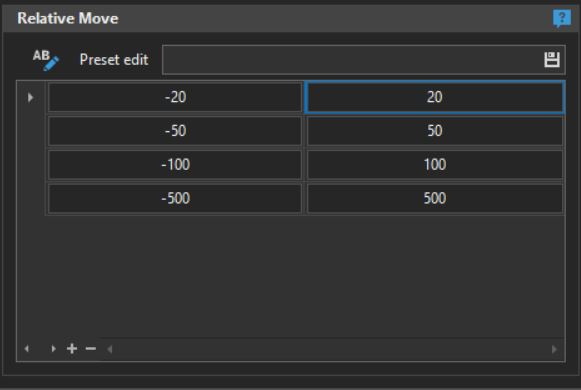
le menu "Relative Move" permet de faire avancer et affiner sa position par pas allant de 20 à 500
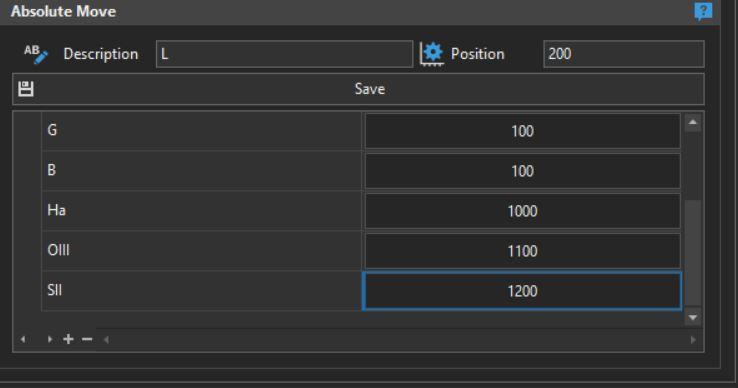
le menu "absolute Move" vous permet de déterminer la position de chacun des filtres que vous allez utiliser. pratique quand on a pas pratiqué pendant des mois
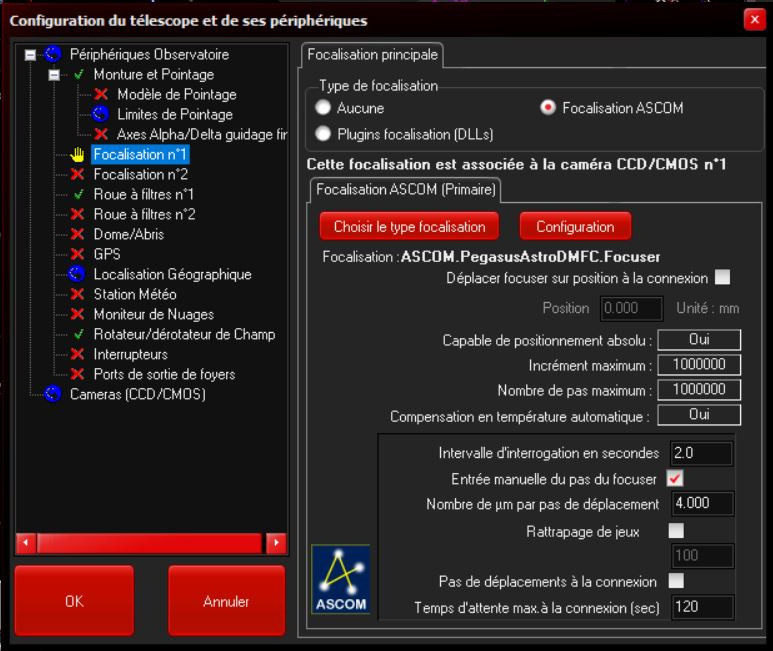
si vous envisagez de l'utiliser sur Prism , il vous faudra choisir le module Pegasus Astro DMFC"
le DMFC est équipé d'une sonde thermique. elle va permettre de gérer la fluctuation des dilatations thermiques du PO . elle sont infimes mais bien présentes .

pour cela vous devrez connaitre le nombre de pas à ajouter en fonction de cette variation de température .
faites vous un tableau en refaisant la MAP en fonction des températures . la courbe vous donnera cette valeur moyenne
conclusion :
Même si ce DMFC est particulièrement efficace et conviviale à l'utilisation je regrette le manque de fixation sur ce boitier.
Bon ciel
Christophe
-
 1
1
0 Commentaire
Commentaires recommandés
Il n’y a aucun commentaire à afficher.
Créer un compte ou se connecter pour commenter
Vous devez être membre afin de pouvoir déposer un commentaire
Créer un compte
Créez un compte sur notre communauté. C’est facile !
Créer un nouveau compteSe connecter
Vous avez déjà un compte ? Connectez-vous ici.
Connectez-vous maintenant