ZWO ASI294MM CAMERA EVALUATION
By Christian Buil
October 2020

This page presents a series of measurements concerning the ZWO ASI294MM Pro CMOS camera, a monochrome version of the longer-known ASI294MC color camera. A comparison is also presented between the ASI294MM camera and the ASI183MM and ASI1600MM cameras, which are relatively equivalent in terms of aspect ratio and purchase cost.
The camera used for this test was kindly provided by Optique Unterlinden, who warmly thanks for their contribution to the better understanding of astronomical equipment performances.
Cette page présente une série de mesures concernant la caméra CMOS ZWO ASI294MM Pro, une version monochrome de la caméra couleur ASI294MC, connue depuis une plus longue date. On présente aussi une comparaison entre la caméra ASI294MM et les caméras ASI183MM et ASI1600MM, relativement équivalentes en termes de format d’image et de coût d’achat.
La caméra utilisée pour ce test a été aimablement fournie par Optique Unterlinden, que je remercie chaleureusement pour son apport à la meilleure compréhension des performances du matériel astronomique.
1. Sensor organization
The core of the ZWO ASI294MM camera seems to be a SONY sensor referenced IMX571. The architecture of this component is particular and its mode of operation is object of debate concerning the physical and effective size of the pixels. The "apparent" photosensitive cell is a grouping of a set of 4 pixels with an individual size of 2.315 microns. Two by two, the elements of this cell can be assigned a different exposure time, so that after combining it is possible to obtain a high dynamic image (HDR technique). If the image seems to be able to be read with this pitch of 2.315 microns, ZWO in the current version of the ASI294MM camera only offers a binned 2x2 mode, in which the pixels of 2.315 microns are combined by software (?) into the chip in a "super pixel" of 4.63 microns (the company QHY seems to offer a "full resolution" mode in its model QHY294M-pro, but this is not the case for ZWO):
Le coeur de la caméra ZWO ASI294MM semble reposer sur un capteur SONY référencé IMX571. L’architecture de ce composant est particulière et son mode de fonctionnement fait débat quant à la taille physique et effective des pixels. La cellule photosensible «apparente» est un regroupement d’un ensemble de 4 pixels dont la taille individuelle est de 2,315 microns. Par groupe de deux, les éléments de cette cellule peuvent se voir affecter un temps d’exposition différent, faisant qu’après combinaison, il est possible d’obtenir une image de haute dynamique (technique HDR). Si l’image semble pouvoir être lue avec ce pitch de 2,315 microns, ZWO dans la version actuelle de la caméra ASI294MM propose seulement un mode aggloméré, «binné 2x2», dans lequel les pixels de 2,315 microns sont rassemblés par voie logicielle (a priori) dans la puce même en un «super pixel» de 4,63 microns de côté (la firme QHY semble proposer un mode «pleine résolution» dans son modèle QHY294M-pro, mais ce n’est pas le cas de ZWO) :

The pixels organization (Sony document from the IMX294CJK detector flyer). The normal mode of use is a binned 2x2 mode. This is the one ZWO offers in its camera. Binning is done in the detector chip itself, which reduces the size of the images a lot, and that's probably why Sony offers this programmable possibility.
L’organisation des pixels (document Sony provenant du flyer IMX294CJK). Le mode normal d’utilisation est un mode binné 2x2. C’est celui proposé par ZWO dans sa caméra. Le binning est réalisé dans la puce détecteur même, ce qui allège beaucoup la taille des images, l’une des raisons faisant que pourquoi Sony propose cette possibilité programmable.
At the end, the ASI294MM output image has 4144 x 2822 pixels of 4.63 microns. The actual encoding observed (after binning) is 14 bits. The photosensible surface is 19.2 mm x 13.0 mm.
Au final, l’image en sortie de la caméra ASI294MM comporte 4144x 2822 pixels de 4,63 microns. Le codage effectif observé (après binning) est sur 14 bits. La surface photosensible fait 19,2 mm x 13,0 mm.
2. Protocol
The electronic gain (inverse) of the camera in electrons/ADU is defined by the formula on the right, with Ne, the signal measured in electrons and Nadu the signal measured in ADU (Analog Digital Unit, or Digital Count):
Le gain (inverse) électronique de la caméra en électrons/ADU est définie par la formule en haut, avec Ne, le signal mesuré en électrons et Nadu le signal mesuré en ADU (Analog Digital Unit).
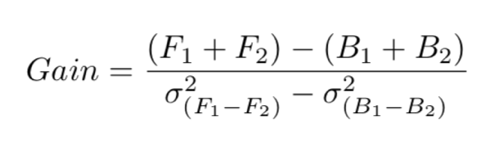
Le gain en électrons/ADU est donné par la formule ci-dessus. F indique le signal en ADU mesuré dans une image flat-field, B indique le signal mesuré dans une image d’offset (zéro signal optique) et « sigma » désigne le bruit mesuré (en ADU) dans une image différence.
The gain in electrons/ADU is given by the formula on the left. F is the signal in ADU on a flat-field image, B is the signal is a bias image, and « sigma » indicate the noise (in ADU) measured in he images difference.
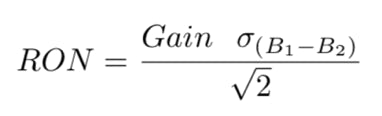
The Read Out Noise (RON) in electrons is computed by using the formula at right.
Le bruit de lecture (RON) est calculé en utilisant la formule ci-contre à droite.
The dark signal rate is measured by the formula on the left. The variable t is he integration time for the dark image. For an accurate measurement, t> 900 sec.
Le taux de courant d’obscurité par seconde est calculé en utilisant la formule en-haut. La variable t est le temps d’intégration utilisé pour réaliser l’image d’obscurité (dark). Pour une mesure précise, t > 900 s.
The spectral characteristics are measured using a UVEX spectrograph (Shelyak Instruments prototype). See also the official UVEX 3D website to find out more about this project: http://spectro-uvex.tech
Les caractéristiques spectrales sont mesurées en utilisant un spectrographe UVEX (prototype Shelyak Instruments). Voir aussi le site officiel UVEX 3D pour en savoir plus sur ce projet : http://spectro-uvex.tech

The relative spectral Quantum Efficiency between cameras A and B is given by the formula at left. Sadu is the measured at a given wavelength (in an uniform flat field of a stable source), g is the gain in e-/ADU, p is the pixel size and t is the integration time.
Le rendement spectral relatif (QE) entre deux caméras A et B est donné par la formule ci-dessus. Sadu est le signal mesuré à une longueur d’onde donnée (dans un plage uniforme stable), g est la gain en électrons/ADU, p est la taille due pixel et t est le temps d’intégration. Le rendement quantique absolue de la caméra ASI183MM, qui sert ici de référence, a été mesuré quant à lui de manière directe à partir d’un détecteur de laboratoire dument étalonné.
All the digital images are captured by using PRISM software. Exploitation is done by using ISIS software. La logiciel PRISM a été utilisé pour l’ensemble de l’acquisition. L’exploitation est réalisée avec le logiciel ISIS.
3. Results for the camera ASI294MM Pro
3.1. Noise
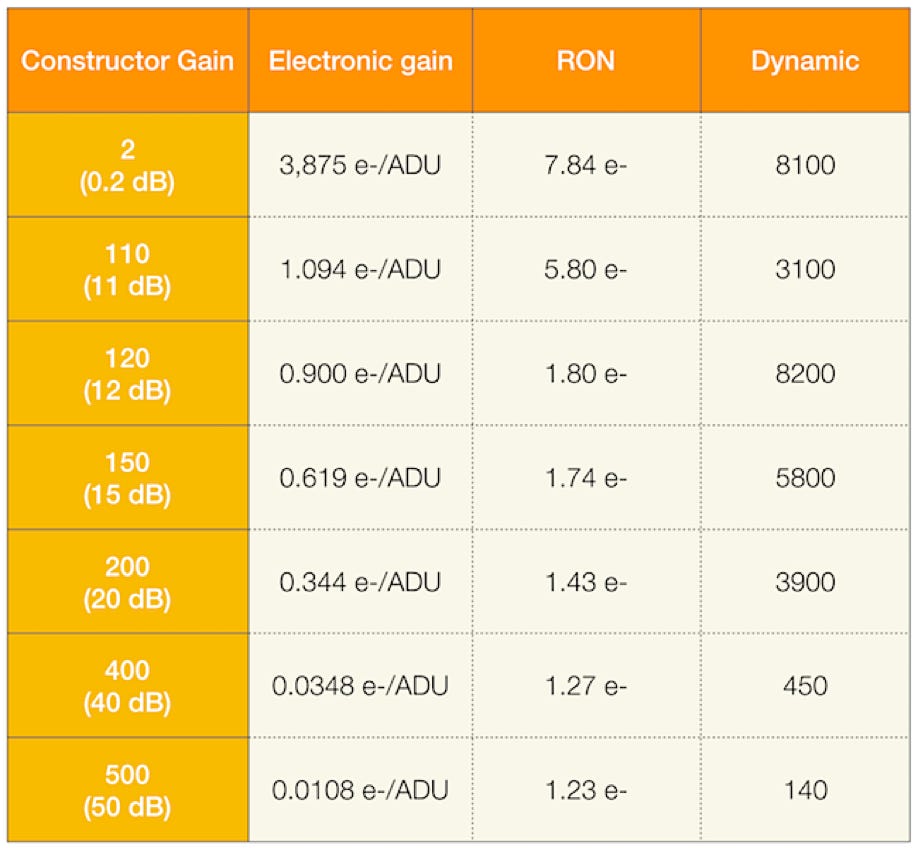
The gain, Read Out Noise and the effective dynamic (taken into account the 14-bits digital resolution is given by the formula: 16384 x Gain/RON):
Le gain, le bruit de lecture, la dynamique effective (en tenant compte de la numérisation sur 14 bits est donnée par la formule : 16384 x Gain /RON) :
Comments:
- The noise reduction is very evident for a gain equal or superior to 120 (HCG mode, i.e. High Conversion Gain).
- For Deep-Sky image applications, the adoption of gain=120 is very recommended (note also the associated high dynamic).
- Because the photon noise is often very low and the RON performance an essential point, for spectrographic application, the gain=200 give the best compromise (for the gain=120, the quantification noise can be significant).
- The gain values inferior to 120 or near 400-500 are of very low interest for astronomy.
Commentaires :
- La diminution du bruit est très significative pour un gain égal ou supérieur à 120 (mode HCG).
- Pour l’imagerie du ciel profond l’adoption du gain=120 est hautement recommandé (il coïncide avec la dynamique maximale).
- Parce que le bruit de photon est souvent très faible et que la performance en bruit de lecture est un point essentiel, pour une application spectrographique, le gain=200 apparaît comme un bon compromis (pour le gain=120, le bruit de quantification peut être significatif et gênant).
- Une valeur de gain inférieure à 120 ou voisine de 400-500 est d’un très faible intérêt en astronomie.
Unsurprisingly, telegraph noise (RTS noise = Random Telegraph Signal) is present, as in most CMOS sensors (see section 4). The RTS is a non-Gaussian noise that manifests as pixels popping up or down relatively the mean in the image at random, with a lifetime of a fraction of a second to a few seconds (this 1/f noise type was almost unknown with CCD sensors and is one of the major difference between CCD technology and CMOS technology at present time).
Sans surprise, le bruit télégraphe (bruit RTS = Random Telegraph Signal ) est présent, comme dans la plupart des capteurs CMOS (voir à la section 4). Le RTS est un bruit non Gaussien qui se manifeste sous la forme de pixels isolés dont l’intensité devient subitement plus intense ou moins intense que la moyenne, avec une constante de temps d’une fraction de seconde à quelques secondes (ce type de bruit, du type 1/f était quasi inconnu avec les capteurs CCD et constitue l’une des différences majeures entre la technologie CCD et la technologie CMOS actuellement).

3.2. Offset
The offset signal (image taken in the dark with a very short exposure time) is very uniform over the entire surface of the sensor and does not show any trace of electronic interference. The following image show a small part of offset signal frame:
Le signal d’offset (image prise dans l’obscurité avec un temps de pose très bref) se révèle très uniforme sur la totalité de la surface du capteur et ne montre pas de trace de parasites électroniques. L’image suivante montre une petite partie d’un cliché du signal d’offset :
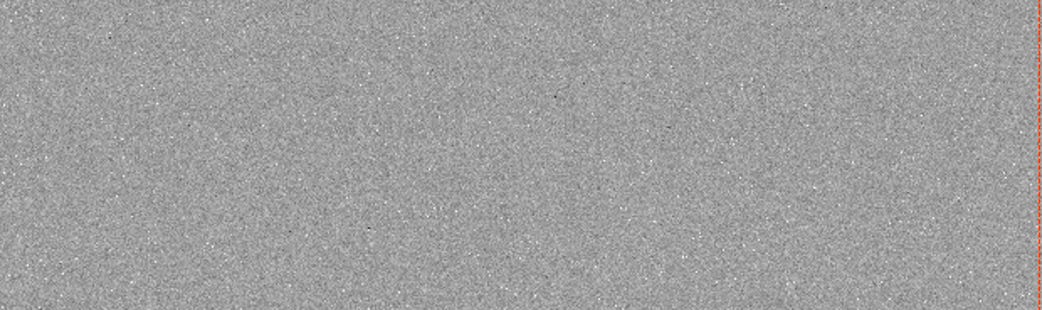
Comment. The offset signal is so uniform that I recommend for processing to equate it to an image of constant level: a synthetic bias, so the constant level is equal to the average (or better, median) intensity of a typical offset taken with the settings selected (gain, offset, temperature). This initiative is one way to reduce processing noise.
Commentaire. Le signal d’offset est si uniforme que je recommande pour les traitements de l’assimiler à une image de niveau constant : un bias synthétique, donc le niveau constant est égal à l’intensité moyenne (ou mieux, médiane) d’un offset typique pris avec les réglages retenus (gain, offset, température). Cette initiative est un moyen de réduire le bruit de traitement.
3.3. Thermal signal
The average thermal charge rate recorded at a temperature of -15°C is 0.0010 electrons per second. For an exposure time of 30 minutes, this thermal signal produces dark signal noise equivalent to the RON.
Le taux de charge thermique moyen relevé à la température de -15°C est de 0,0010 électron par seconde. Pour un temps de pose de 30 minutes, ce signal d’obscurité » est associé à un bruit thermique équivalent au bruit de lecture (RON).
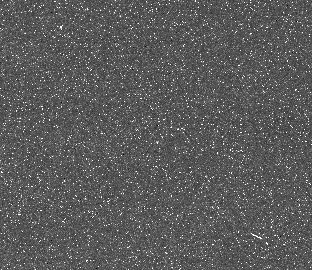
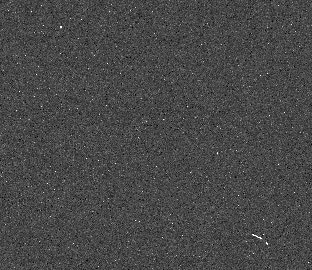
On the upper left, part of a long exposure image taken in the dark (exposure time = 1200 seconds, temperature = -15 ° C and gain = 200). It is a DSNU (= Dark Signal Non Uniformity). On the upper right, this same image after subtracting a"master ”of the dark signal image (average of at least 10 elementary dark frames). The hot spots have disappeared, so the behavior of the ASI294MM camera is standard. We note an impact trace of a cosmic ray arriving obliquely in the lower right part of this document, as well another arriving perpendicular to the sensitive surface at the top left. Low intensity bright spots correspond to RTS noise, not removed by subtracting a reference image from the dark signal.
En haut à gauche, l’extrait d’une image longue pose prise dans l’obscurité (avec un temps de pose de 1200 secondes, une température de -15°C et un gain de 200), ou DSNU pour « Dark Signal Non Uniformity). En haut à droite, cette même image après soustraction d’une image « maître » du signal d’obscurité (moyenne de 10 images d’obscurité élémentaires au moins). Les points chauds ont bien disparu, le comportement de la caméra ASI294MM est donc standard. On note la trace de l’impact d’un rayon cosmique arrivant obliquement dans la partie inférieure droite de ce document, ainsi qu’un autre arrivant perpendiculairement à la surface sensible en haut à gauche. Les points brillants de faible intensité correspondent au bruit RTS, non éliminé par la soustraction d’une image de référence du signal d’obscurité.
3.4. Pixel Response Non-Uniformity
The uniformity of pixel response to uniform illumination (PRNU) appears very different depending on whether the gain is less than 120 or equal or greater than 120: the HCG mode has a more profound impact than one might think on the operation of the sensor. This can be seen on the extracts of polychromatic (in white light) uniform plage (flat-fiel), with an illumination producing a signal equal to 2/3 of the dynamic range:
La non uniformité de réponse des pixels à un éclairement uniforme (PRNU) apparait très différente suivant que le gain est inférieur à 120 ou égal ou supérieur à 120 : le mode HCG a un impact plus profond que l’on ne pense sur le fonctionnement du capteur. On peut le constater sur les extraits de plages de lumière uniforme (PLU) polychromatique (en lumière blanche), avec un éclairement produisant un signal égal au 2/3 de la dynamique :
Top left, a flat-field image produced with a gain of 110. The observed contrast of the structure represents approximately 1% of the average signal. It does not change shape as a function of gain when it is less than 120. Top right, the same part of the detector with a gain of 120 (or higher). The PRNU is then less than approximately 0.1%.
En haut à gauche, une image de PLU réalisé avec un gain de 110. Le contraste de la structure observée représente environ 1% du signal moyen. Elle n’évolue pas en forme en function du gain lorsque celui-ci est inférieur à 120. En haut à droite, la même partie du détecteur avec un gain de 120 (ou supérieur). La PRNU est alors inférieure à 0,1% environ.
3.5. Amp-glow
The image below shows that the "amp-glow" (electroluminescent phenomena of integrated circuits on the detector chip) is unfortunately present in the sensor that equips the ASI294MM camera. The level is close to that observed with an ASI183MM camera for example. This document is a raw exposure in the dark for 1200 seconds at -15 ° C, binned 6x for the display and viewed at high-contrast:
L’image ci-dessous montre que le « amp-glow » (électroluminescence des circuits intégrés sur la puce détecteur) est malheureusement bien présent dans le capteur qui équipe la caméra ASI294MM. Le niveau constaté est voisin de celui observé avec une caméra ASI183MM par exemple. Ce document est une pose brute dans l’obscurité de 1200 secondes à -15°C, binné 6x pour le besoin de l’affichage et visualisé à haut-contraste :

Comment. Amp-glow is an annoying phenomenon for deep sky observers or for spectrography. Admittedly, the light part is correctly eliminated in pre-processing by subtracting the master dark signal, but there is still the photon noise generated by this light, which is far from being negligible for very low flux observation. I was familiar with this difficulty at the start of CCD imaging, then manufacturers quickly found the solution (electrical cut-off of the circuits causing glow during the exposure time). We also come with CMOS, for example we no longer talk about amp-glow with the ASI6200MM camera equiped by the very latest generation Sony sensor (IMX455). The good news here for spectrography is that most of the glow is out of the center of the sensor, so the trace of a spectrum will generally be little affected (this is no longer true if the camera is used on a échelle spectrograph). QHY says it has been successful in reducing amp-glow. I was able to download from the QHY site a raw image from a QHY294MM camera that illustrates this point (estimated equivalent ZWO gain ZWO 120 and temperature of -20°C - see here). You have to be very careful during this type of comparison because I did not have the QHY camera in my hands, but in fact, on the basis of the available documents, the amp-glow appears to be very similar (the image contrast is chosen identical):
Commentaire. Le amp-glow est un phénomène gênant pour les observateurs du ciel profond ou pour la spectrographie. Certes, la partie lumineuse s’élimine correctement en pré-traitement en réalisant la soustraction du signal d’obscurité, mais il demeure le bruit de photons généré par cette lumière, qui est loin d’être négligeable en observation très faible flux. J’ai bien connu cette difficulté au début de l’imagerie CCD, puis les constructeurs ont vite trouvé la parade (coupure électrique des circuits à l’origine de l’électroluminescence lors du temps de pose). On y vient aussi avec le CMOS, par exemple on ne parle plus de amp-glow avec la caméra ASI6200MM qui utilise un capteur Sony de toute dernière génération (IMX455). La bonne nouvelle ici pour la spectrographie est que l’essentiel du glow est hors du centre du capteur, si bien que la trace d’un spectre sera en général peu affecté (ce n’est plus vrai si on utilise cette caméra avec un spectrographe échelle). La société QHY précise qu’elle est parvenue à réduire l’amp-glow. J’ai pu télécharger sur le site QHY une image brute venant d’une caméra QHY294MM qui illustre ce point (gain estimé équivalent de 120 chez ZWO et température de -20°C - voir ici). Il faut être très prudent lors de ce type de comparaison, car je n’ai pas eu la caméra QHY entre les mains, mais de fait, sur la base des documents disponibles, le amp-glow apparait fort voisin, qu’il s’agisse d’une caméra QHY ou d’une caméra ZWO (le contraste d’image est choisi identique) :
300 sec. exposure and gain=1600 on a QHY294M camera.
Pose de 300 s avec le gain 1600 sur une caméra QHY294M (température de -20°C).

300 sec. exposure and gain=120 on a ASI294MM camera.
Pose de 300 s avec le gain 120 sur une caméra ASI294MM (température de -20°C).
3.6. Linearity
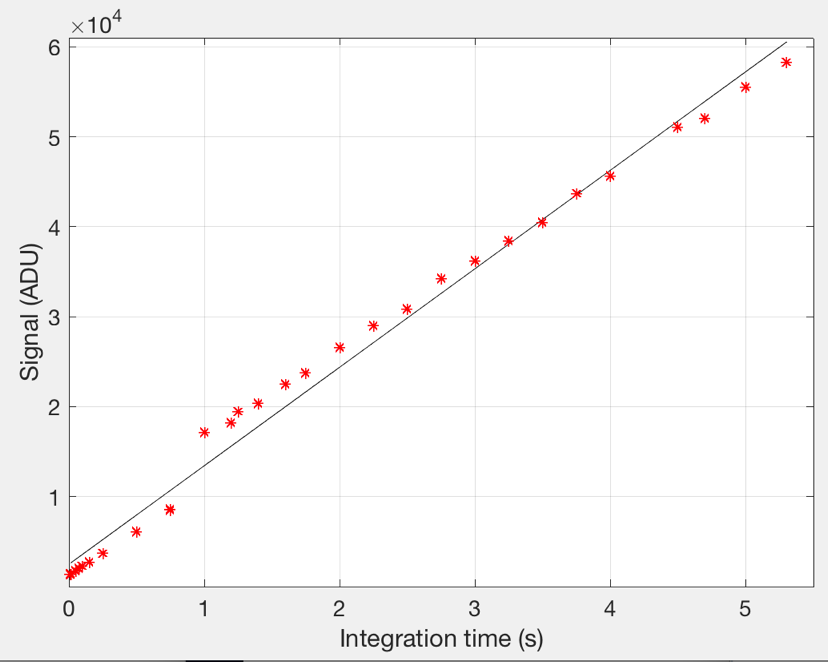
The graph on the right shows the response linearity of the ASI294MM camera as a function of recorded signal velue (the measurement is performed by varying the integration time for a constant optical flux). The measurement points are represented by red stars (gain = 200), while the continuous curve is the best adjusted line. The jump in the signal between an exposure time of 0.999 seconds and 1.000 seconds is real and comes as a surprise. A check with FireCapture software shows the same phenomenon. This is clearly an unreported bug in the camera's firmware or driver. The problem is also encountered on the ASI183MM camera and seems to affect the entire ZWO model (TBC).
Le graphique ci-dessus montre la linéarité de réponse de la caméra ASI294MM en fonction de la valeur du signal enregistré (la mesure est effectuée en faisant varier le temps d’intégration pour un flux optique contant). Les points de mesures sont représentés par des étoiles de couleur rouge (gain = 200), alors que la courbe continue est la meilleure droite. Le saut dans le signal entre un temps de pose de 0,999 seconde et de 1,000 seconde est réel et constitue une surprise. Une vérification avec le logiciel FireCapture montre le même phénomène. Il s’agit clairement d’un bug dans le firmware ou le driver de la caméra, non signalé. Le problème est aussi rencontré sur la caméra ASI183MM et semble concerner l’ensemble de la gamme ZWO (à confirmer).
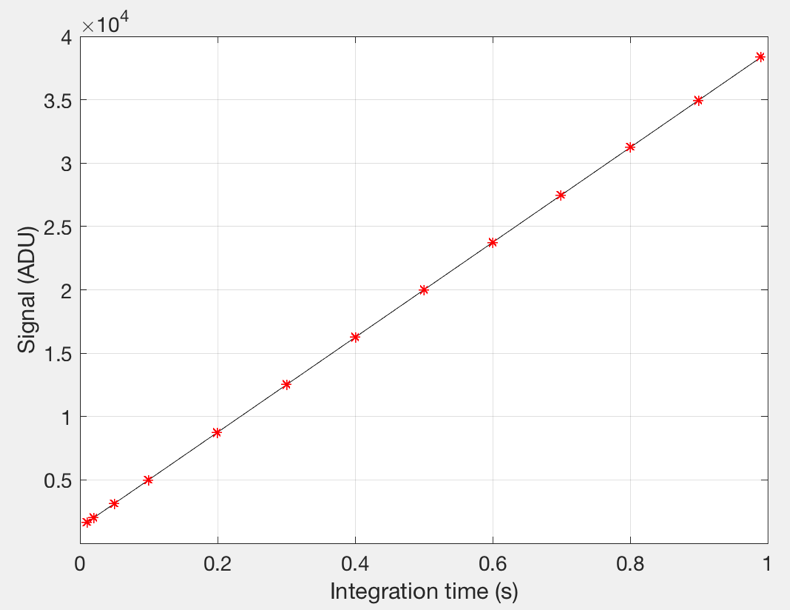
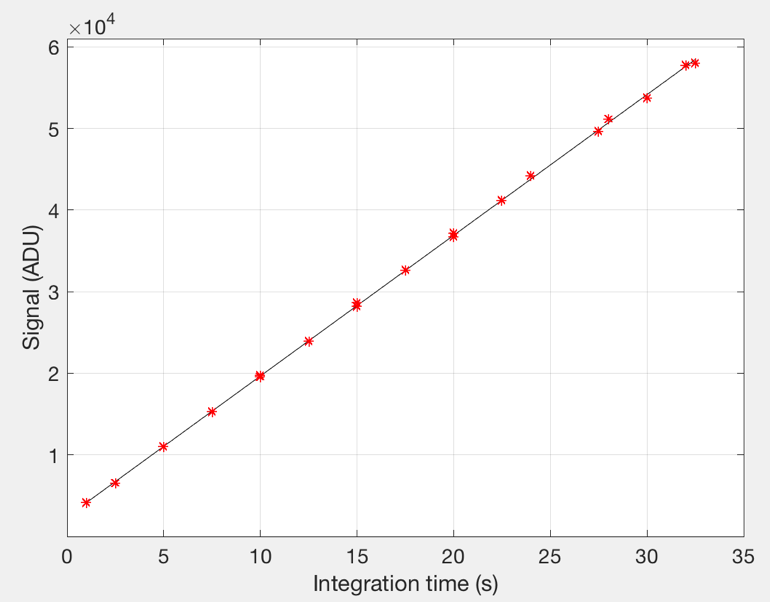
Above, detail of the response linearity measured for the two sections, corresponding to an exposure time less than or greater than 1 second. The gain here is 120. In both cases the linearity error is very low (in the measurement noise range), which is quite satisfactory and indicates the good performance of CMOS sensors today.
Ci-dessus, détail de la linéarité de réponse mesurée pour les deux tronçons, correspondant à un temps de pose inférieur ou supérieur à 1 seconde. La gain est ici de 120. Dans les deux cas l’erreur de linéarité est très faible (dans le bruit de mesure), ce qui est tout à fait satisfaisant et dénote de la bonne performance des capteurs CMOS aujourd’hui.
3.6. Quantum efficiency
The following table presents the quantum efficiency evaluated at the level of the camera system (the optical transmission of the camera window occurs, in particular in the blue and ultraviolet and may deviate from the quantum efficiency of the detector itself in this part of the spectrum):
Le tableau suivant présente le rendement quantique évalué au niveau du système caméra (la transmission optique du hublot de la caméra intervient, en particulier dans le bleu et l’ultraviolet, d’où un résultat susceptible de dévier du rendement quantique du détecteur lui-même dans cette partie du spectre) :
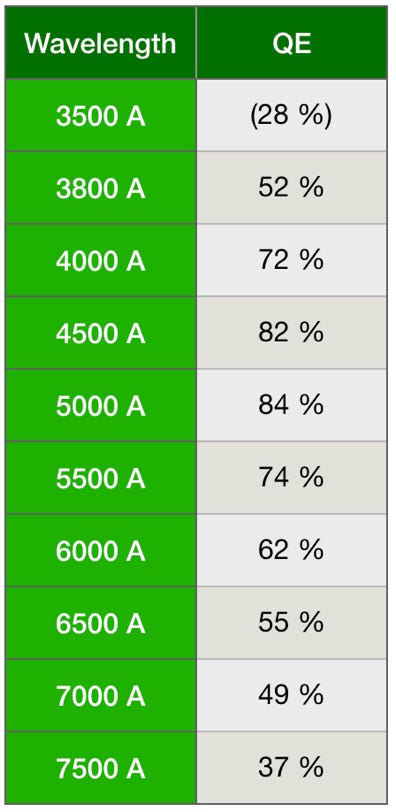
Comment. The quantum efficiency measured at the peak is close to the quantum efficiency announced by Sony. It is particularly high, around 84% in the green. The value sometimes announced of 90% is not credible: the quantity of light returned by a simple reflection from the sensitive surface observed by the eye clearly shows that the photon absorption does not reach this value (the surface of the sensor appears no so dark). The intensity of this reflection is close between the ASI183MM camera and the ASI294MM camera (a simple visual examination of the detector is enough to get a little idea of the quantum efficiency!).
Commentaire. Le rendement quantique mesuré au pic se révèle voisin du rendement quantique annoncé par Sony. Il est particulièrement élevé, environ 84% dans le vert. La valeur parfois annoncée de 90% ou plus n’est pas crédibles : la quantité de lumière renvoyée par une simple réflexion de la surface sensible observée à l’oeil montre bien que l’absorption photonique n’atteint pas cette valeur (la surface du capteur apparaitraît plus sombre). L’intensité de ce reflet est proche entre la caméra ASI183MM et la caméra ASI294MM (un simple examen visuel du détecteur suffit à avoir une petite idée du rendement quantique !).
4. Comparison
Right, the main performances of ASI294MM camera are compared to that measured by the author on the ASI1600MM and ASI183MM cameras.
A droite, les principales performances de la caméra ASI294MM sont comparées à celles mesurées par l’auteur sur les caméras ASI1600MM et ASI183MM.

Comment. The reading noise of ASI294MM camera (in fact of the sensor that equips it) appears to at the same level as that of the ASI183MM for example. Assuming the sensor performs software binning by the average of 4 adjacent pixels, the elementary noise per physical pixel of 2.315 pixels would be only 0.715 e-, which is an extremely low value. Under these conditions, it is regrettable that the 1x1 binning mode is not unlocked in the ZWO model (whereas it seems to be in the competing QHY model). Questions as to whether this 1x1 mode is actually accessible, whether it keeps its promises, and whether it does not reveal any other issues are raised as this is written.
Commentaire. Le bruit de lecture de la caméra de la ASI294MM (en fait du capteur qui l’équipe) apparait du même niveau que celui de la ASI183MM par exemple. Dans l’hypothèse où le capteur réalise un binning logiciel par moyenne de 4 pixels adjacents, le bruit élémentaire par pixels physiques de 2,315 pixels ne serait que de 0,715 e-, c’est-à-dire une valeur extrêmement basse. Dans ces conditions, on peut regretter que le mode binning 1x1 ne soit pas débloqué dans le modèle ZWO (alors qu’il semble l’être dans le modèle concurrent chez QHY). Les questions de savoir si ce mode 1x1 est effectivement accessible, s’il tient ces promesses et s’il ne révèle pas d’autres problèmes sont posées au moment où sont écrites ces lignes.
Comparison of quantum efficiency / Comparaison du rendement quantique :
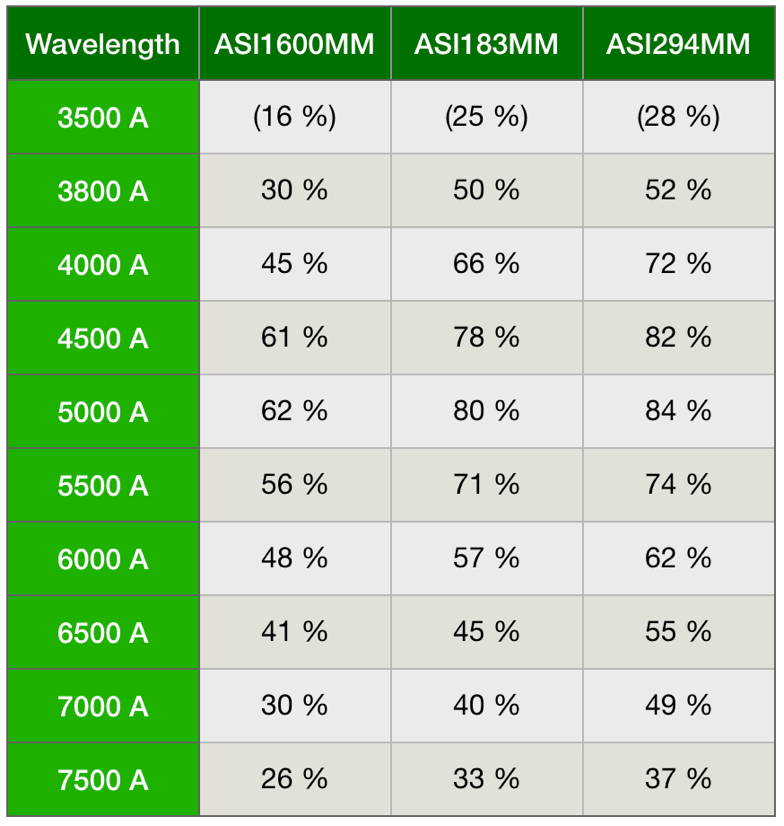
The ASI294MM camera offers the highest quantum efficiency of the models tested, narrowly in the middle of the visible spectrum, but more marked in the red and in the blue. Deep sky observers (and also spectroscopists) will be satisfied for the gain at the red hydrogen line level (6563 A), while the gain in the blue and UV will satisfy people who practice spectrography due to the richness of the spectrum of stars at these wavelengths. However, according to my measurements, we do not find a performance of 90% at peak (or upper), as is sometimes announced - the Sony sensor technologies that equip the ASI183MM and ASI294MM cameras appear to be similar on this point. The Panasonic sensor of the ASI1600MM camera, however, shows its age.
La caméra ASI294MM offre le rendement quantique le plus élevée des modèles testés, de justesse dans le milieu du spectre visible, mais de façon plus marqués dans le rouge et dans le bleu. Les observateurs du ciel profond (et aussi les spectroscopistes) vont se réjouir du gain au niveau de la raie rouge de l’hydrogène (6563 A), alors que le gain dans le bleu et l’UV va satisfaire les personnes qui font de la spectrographie en raison de la richesse du spectre des étoiles à ces longueurs d’onde. Mais comme dit plus haut, on ne retrouve cependant pas d’après mes mesures un rendement de 90% au pic, comme parfois cela est parfois annoncé - les technologies des capteurs Sony qui équipent les caméras ASI183MM et ASI294MM apparaissent voisines sur ce point. La capteur Panasonic de la caméra ASI1600MM montre en revanche son age.
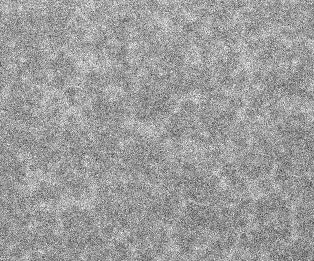
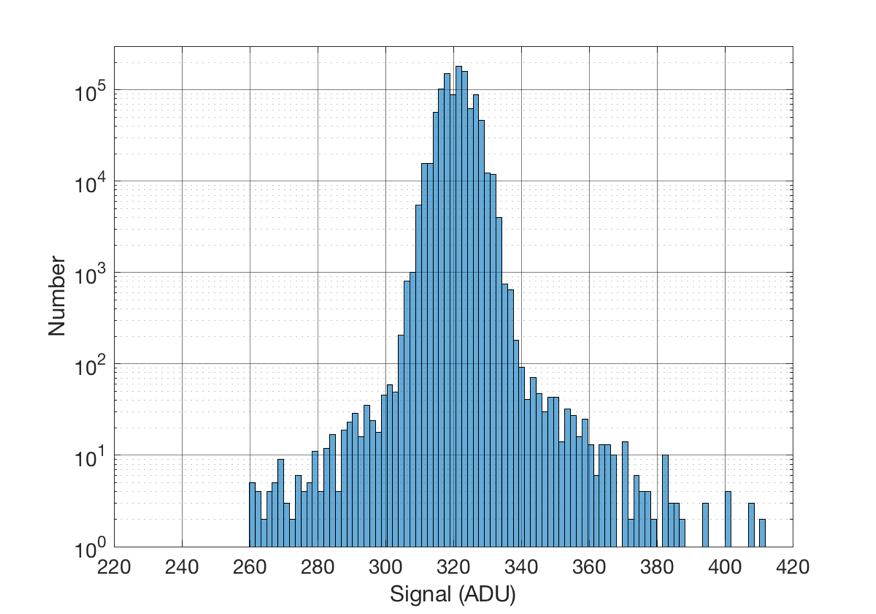
A very important point of comparison between CMOS detectors, which is often overlooked in discussions, concerns telegraph noise, or RTS noise. This non-Gaussian noise is superimposed on the read noise, and like the latter, determines the detectability of the system (its ability to observe faint objects). Here is the "visual" comparison of the RTS in an offset image section displayed with the same high contrast on an ASI183MM camera and an ASI294MM camera:
Un élément de comparaison entre détecteurs CMOS très important, alors qu’il est souvent négligé dans les discussions, concerne le bruit télégraphe, ou bruit RTS. Ce bruit non gaussien se superpose au bruit de lecture, et comme ce dernier, détermine la détectabilité du système (ca capacité à observer des objets de faible éclat). Voici la comparaison « visuelle » du RTS dans un extrait d’image d’offset affiché avec le même haut contraste sur une caméra ASI183MM et une caméra ASI294MM :
ASI183MM
ASI294MM
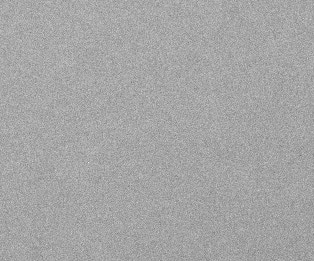
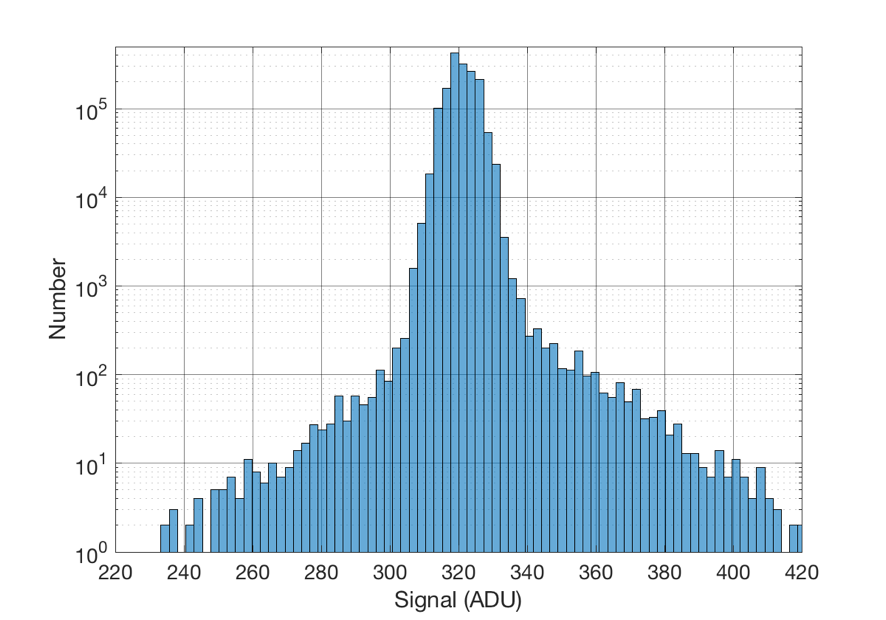
The difference may seem subtle, but the RTS noise is more accentuated in the ASI294MM image than in the ASI183MM image, which is not a very good news for the tested camera (be careful, the same problem is expected with other manufacturers, it is not the camera which is involved, but the detector). To better understand the situation, here is a less subjective result in the form of histograms (the number of pixels taken into account is the same in both cases):
La différence peut paraitre subtile, mais le bruit RTS est plus accentué dans l’image ASI294MM que dans l’image ASI183MM, ce qui n’est pas une très bonne nouvelle pour la caméra faisant l’objet de ce test (attention, le même problème est attendu chez les autres constructeurs, ce n’est pas la caméra qui est en cause, mais le détecteur). Pour mieux appréhender la situation, voici un résultat moins subjectif sous la forme d’histogrammes, avec une échelle logarithmique (le nombre de pixels pris en compte est le même dans les deux cas) :
ASI183MM
ASI294MM
The central part of these distributions represents the majority of the pixels in the image and describes the dispersion of intensities around the mean related to the reading noise. The extension at the bottom is associated with RTS noise. The RTS distribution is more extensive in the case of the ASI294MM camera sensor, which is indicative of higher non-Gaussian noise. This result is surprising (and disappointing): taking into account the hypothetical on-chip 2x2 binning, we could expect an RTS noise approximately 2 or 3 times inferior (for example for 4 binned pixels, if only one is affected by RTS noise, the 2x2 average attenuates the problem by a factor 4). For demonstration, I show below the positive effect of binning on the RTS by using the ASI183MM camera:
La partie centrale de ces distributions représente la majorité des pixels de l’image et décrit la dispersion des intensités autour de la moyenne liée au bruit de lecture. L’évasement dans la partie inférieure est associé au bruit RTS. La distribution du RTS est plus étendue dans le cas du capteur de la camera ASI294MM, ce qui est le signe d’un bruit non gaussien plus élevée. Ce résultat est d’autant plus surprenant (et décevant) que, compte tenu de l’hypothétique binning 2x2 réalisé, on pouvait s’attendre à un bruit RTS environ 2 ou 3 fois plus faible (par exemple avec 4 pixels binné, si un seul est affecté par le bruit RTS, la moyenne 2x2 atténue le défaut d’un facteur 4). A titre de démonstration, je montre ci-après l’effet positif du binning sur le RTS avec la caméra ASI183MM :

ASI183MM
Binning 1x1 - Pixel size : 2.4 microns
Noise : 1.58 e-
ASI183MM
Binning 2x2 - Pixel size : 4.8 microns
Noise : 0.81 e-
As expected by signal theory, after 2x2 binning, the readout noise is reduced by a factor 2 approximately (1.58 e- -> 0.81 e-), but also the RTS noise is strongly attenuated, this which guarantees a lower number of artifacts in the final image and a better detectability. We can therefore be concerned about what we observe in 2x2 binning (software) with the ASI292MM camera sensor: it potentially indicates a poor result for a 1x1 binning if the logic of this binning is followed. So be careful as long as this has not been verified... We note here the advantage of small pixels with CMOS detectors since they allow the optical image to be oversampled. Numerical filtering can be applied (of median type) and the spatial résolution is preserved (image sharpness).
Comme attendu par la théorie du signal, après le binning 2x2, le bruit de lecture est réduit d’un facteur 2 environ (1,58 e- -> 0,81 e-), mais surtout le bruit RTS est fortement atténué, ce qui est le garant d’un moins grand nombre d’artefacts dans l’image finale et d’une meilleure détectabilité. On peut donc s’inquiéter de ce que l’on observe en binning (logiciel) 2x2 avec le capteur de la caméra ASI292MM : il indique potentiellement un résultat médiocre en binning 1x1 si la logique de ce binning est respectée. Prudence donc tant que tout ceci n’est pas vérifié… On note ici l’intérêt des petits pixels avec les détecteurs CMOS dès lors qu’ils permettent de sur-échantillonner l’image optique. Un filtre peut alors être appliqué pour réduire le RTS, sans que la finesse de l’image traités soit significativement affectée (le piqué des images).
The interpretation of noise values is nether an easy task. For a correct analysis it is important to compare cameras with the same equivalent pixel size, an ASI294MM with these pixels of 4.63 microns on one side, and an ASI183MM camera operated in 2x2 binning on the other, i.e. with 2 x 2.4 = 4.8 microns, roughly the same value as for the ASI294MM. Also, consider that a fine performance criteria is the the Signal to Noise Ratio (SNR) in function of the situation.
For simplicity, it is assumed here that the pixel size is ultimately the same on ASI183MM (after 2x2 binning) and on ASI294MM. It is also assumed that for a given exposure time, a ASI294MM pixel collects 100 photo-electrons (arbitrary, only for the demo). In the elementary pixels of the ASI183MM camera this gives 100/4 = 25 photo-electrons. By putting noise the measured values, the result in term of signal to noise ratio (SNR) for some processing hypothesis is :
L’interprétation des valeurs du bruit n’est jamais une tâche simple. Pour une analyse correcte, il est important de comparer les caméras sur la base d’une même taille de pixel, d’un coté des pixels de 4,63 microns pour la caméra ASI294MM, d’un autre coté une caméra ASI183MM travaillant en binning 2x2, c’est-à-dire avec des pixels de 2 x 2,4 = 4,8 microns, soit approximativement la même taille que la ASI294MM. Il faut aussi considérer le très bon critère de performance qu’est le Rapport Signal sur Bruit (RSB, ou SNR en anglais).
Pour simplifier le raisonnement, je considère que les pixels ont la même dimension après le binning 2x2 sur les caméras ASI183MM et ASI294MM. Je considère aussi que pour un temps de pose donné, un pixel de la caméra ASI294MM collecte 100 photo-électrons (c’est arbitraire et uniquement pour le besoin de la démonstration). Dans un pixel élémentaire de la caméra ASI183MM cela donne 100/4 = 25 photo-électrons. En ajoutant les valeurs du bruit mesuré pour ces caméras, voici ce que cela donne en terme de rapport Signal sur Bruit pour plusieurs hypothèses de traitement des données :

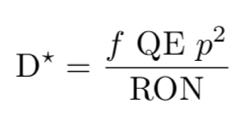
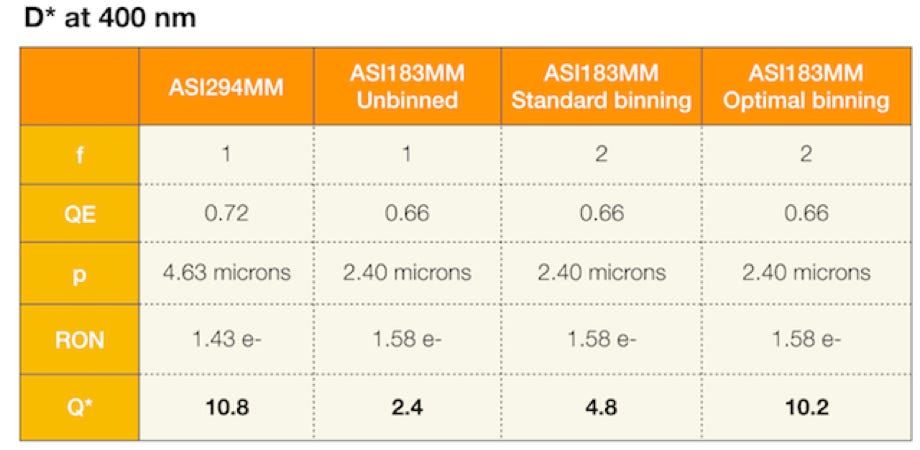
I propose a simple and precise tool to compare the efficiency of cameras (CMOS or CCD) in the general case, based on the reasoning described above. This is the « detectivity », D*, defined by the following formula for standard use of the sensor:
Je vous propose un outil simple et précis pour comparer l’efficacité des caméras (CMOS ou CCD) dans le cas général, basé sur le raisonnement décrit précédemment. Il s’agit de la « détectabilité », D*, définie par la formule suivante pour un usage standard du capteur :
We can note that pixels binning of the ASI183MM in a traditional way give a much lower signal-to-noise ratio compared to the ASI294MM. It is the base problem of small pixels for the detection. Basically, the ASI183MM is twice worse if it work in standard 2x2 binning mode (if the observation absolutely requires small pixels, say 2.5 microns, then there is no more battle, the ASI294MM does not offer this possibility and the ASI183MM wins hands down!).
This is also why I insist quite a bit on CMOS oversampling and the use of noise reduction algorithms. If we applied a simple 3x3 median filtering before binning, the RSB rises to 50 for the ASI183MM, the difference is only 1.4, but still in favor of the ASI294MM.
It is possible to apply all the capacities of an algorithm like CMED i.e. large oversampling of the raw image (last row of the table) the ASI183MM finally equals the ASI294MM in term of RSB (note that doing statistics (standard deviation, average) on data whose noise distribution is not Gaussian can generate interpretation difficulties, but the trend is there).
At first order, because the Quantum Efficiency is nearly the same for the two camera considered, the morality is:
(1) For an application which is satisfied with large pixels of 4.6 to 4.8 microns (for example, long focal length Deep-Sky imagery, UVEX on a relatively large telescope and a 35 microns slit for spectrography), the ASI294MM is probably the most efficient, but with a nuance for me concerning the famous RTS noise which gives the impression that the image contains artefacts (1/f noise). The RTS gives a mitigated result for very faint flux applications (spectrography…) if no filtering is applied (we hesitate to filter the RTS noise of ASI294MM images by using a non-linear filter like median because the potential risk of breaking the images sharpness and the photometry — for safety, the FWHM in the image to be filtered (the impulse response) must be at least of 7 pixels).
(2) For small pixels applications, of course, only the ASI183MM can be used while waiting for a status of the possible "super resolved" mode of the QHY294M.
On note que la caméra ASI183MM exploitée avec un binning traditionnel (simple addition 2x2 des pixels) produit un résultat nettement moins bon que celui de la caméra ASI294MM (SNR de 32 pour un SNR de 70). C’est le résultat attendu en matière de détection lorsqu’on ne dispose que de petits pixels. Il advient ici dès lors que l’observation réalisée est en adéquation avec des pixels d’une taille de 4, à 4,8 microns.
On comprend aussi pourquoi j’insiste sur le besoin de sur-échantillonner les images CMOS et pour appliquer en conjonction des algorithmes de réduction de bruit. Si on applique ici un simple filtrage médian 3x3 avant le binning, le RSB monte à 50, mais n’arrive pas encore à la hauteur de la ASI294MM.
Il faut utiliser tout le potentiel d’un algorithme comme CMED (s’il est applicable grâce à un assez fort sur-échantillonnage des images brutes) pour qu’enfin la caméra ASI183MM égale la caméra ASI294MM en terme de rapport signal sur bruit (tous ces calculs sont délicats car il est problématique de calculer des écarts-type et moyenne sur un bruit non parfaitement gaussien, mais la tendance est juste).
Au premier ordre, et parce que le rendement quantique est voisin pour les deux caméras considérées, la moralité de cette affaire est que :
(1) Pour une application qui se satisfait de pixels dont la taille est comprise entre 4,6 et 4,8 microns (par exemple, l’imagerie du Ciel Profond avec une assez longue focale, ou avec un spectrographe type UVEX exploité avec une fente de 35 microns), la caméra ASI294MM est probablement la plus efficace, mais avec une nuance pour moi : ce fameux bruit RTS, qui donne l’impression que l’image contient des artefacts (bruit 1/f). Ce RTS donne un résultat mitigé avec la caméra ASI294MM en imagerie très faible flux (spectrographie) si on n’applique pas un filtrage minimal (on hésite à d’appliquer un filtre non linéaire type médian si l’image est mal échantillonnée pour ne pas casser la finesse et la photométrie du contenu — retenez cette règle : il faut que le FWHM, la largeur à mi-hauteur de la réponse impusionnelle, soit au moins de 7 pixels dans l’image brute pour pouvoir raisonnablement appliquer un filtrage médian 3x3).
(2) Pour des applications qui demandent des petits pixels, bien sûr, seule la caméra ASI183MM est la réponse tant que la situation du mode « super-résolution » de la QHY294M n’est pas éclaircie).
and by the following formula, if we apply the CMED algorithm almost optimally (the coefficient 0.47 has been found empirically on many tests):
et par la formule suivante, si on applique l’algorithme CMED de manière quasi optimale (le coefficient 0,47 a été trouvé empiriquement sur de nombreux tests) :
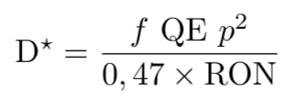
with, f, the binning factor, QE, the quantum efficiency at a given wavelength, p, the physical width of the pixel, RON, the read noise in the raw image.
avec, f, le facteur de binning, QE, le rendement quantique à une longueur d’onde donnée, p, la largeur physique du pixel, RON, le bruit de lecture dans l’image brute.

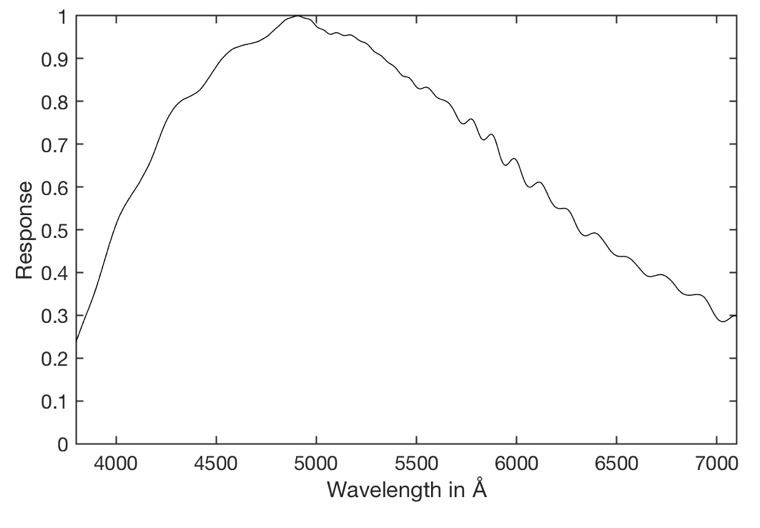
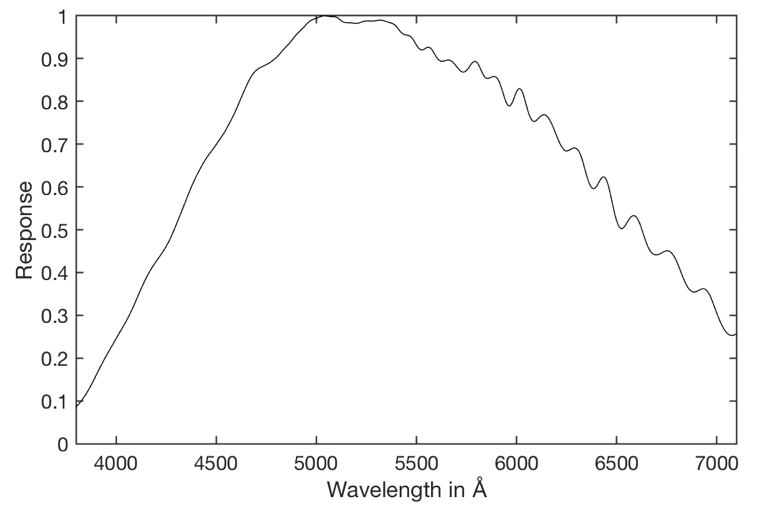
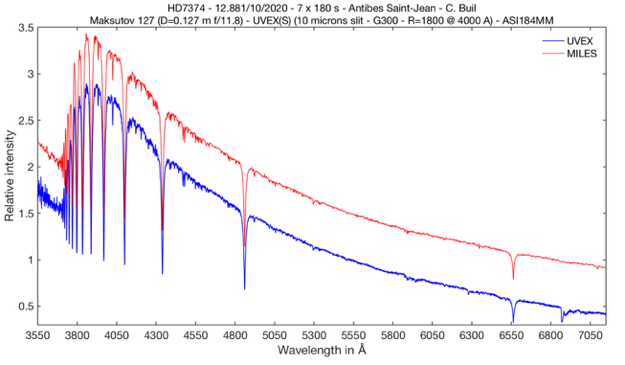
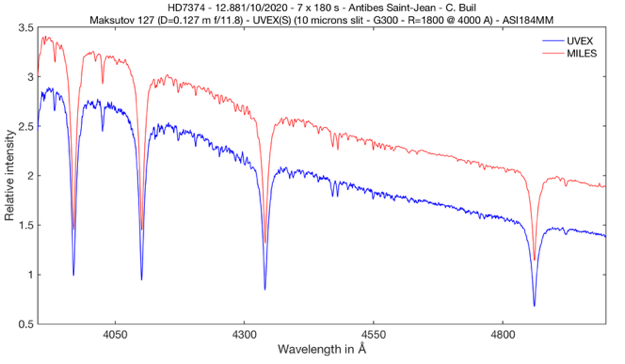
For specific spectrographic applications, the sensors of the ASI183MM camera and the ASI294MM camera show strong oscillations in the red part of the spectrum, more contrasted for the second. Be careful, these curves do not represent the efficiency of the detector, because their aspects depend on the optical characteristics of the telescope and the spectrograph (here a UVEX model) during measures. See quantum efficiency for this. On the other hand, the “fringes” are well linked to the detector. Theses chips are thinned, a very possible explanation for the fringes in the red.
Pour les applications spécifiquement de spectrographie, les capteurs de la caméra ASI183MM et de la caméra ASI294MM montrent des oscillations fortes dans la partie rouge du spectre, plus contrastées pour la seconde. Attention, ces courbes ne représentent pas le rendement du détecteur, car l’aspect dépend des caractéristiques optiques du télescope et du spectrographe (ici un modèle UVEX pour la prise des spectres) utilisés lors des mesures. Voir les courbes de rendement quantique pour cela. En revanche, les « franges » sont bien liées au détecteur. Ces puces sont amincies, ce qui est l’explication très probable de franges dans le rouge.
On the basis of the detectivity criterion, surely the most effective for comparing detectors, given the size of the pixels, it appears that the ASI294MM camera is always superior to the ASI183MM camera, but only a little if we make the effort to apply an algorithm like CMED on ASI183MM data and if the sampling is correct (and for the ASI183MM a cosmetic aspect more satisfactory than for the ASI294MM camera, thanks to the total suppression of the RTS noise, or pseudo noise).
Sur la base du critère de détectabilité, surement le plus efficace pour comparer les détecteurs, compte tenu de la taille des pixels, il apparait que la caméra ASI294MM est toujours supérieure à la caméra ASI183MM, mais de peu si on fait l’effort d’appliquer un algorithme comme CMED sur des données ASI183MM et si l’échantillonnage si prête (avec cette fois pour la ASI183MM un aspect cosmétique plus satisfaisant que pour la caméra ASI294MM grace à la suppression totale du bruit RTS, ou pseudo bruit).
ASI183MM
ASI294MM
The response to a monochromatic radiation of the detector of the ASI183MM and ASI294MM cameras is very different in the red and infrared part, as shown in the part of images below. Because a special processing, only the high spatial frequency details are displayed. The wavelength axis is horizontal. The ASI183MM camera sensor shows a checkerboard structure, which is surely the result of the silicon foundry process. The monochromatic PRNU is on the order of 4% in red and 1% in blue at most. The non-uniformity for the ASI294MM camera sensor is rather low-frequency, with a monochromatic PRNU of 2% in the red. The can be a useful info for Deep-Sky observers through narrow band filters.
La réponse à un rayonnement monochromatique du détecteur des caméras ASI183MM et ASI294MM est fort différente dans la partie rouge et infrarouge, comme l’indiquent les extraits d’images ci-après. L’axe des longueurs d’onde est horizontal. Le capteur de la caméra ASI183MM montre une structure en damier, qui est surement le résultat du processus de fonderie du silicium. La PRNU monochromatique est de l’ordre de 4% dans le rouge et de 1% dans le bleu tout au plus. La non-uniformité pour le capteur de la caméra ASI 294MM est plutôt basse-fréquence, avec une PRNU monochromatique de 2% dans le rouge. Ce résultat peu intéressé les spécialistes de l’observation du ciel profond avec des filtres spectralement étroit.


ASI183MM
ASI294MM
Also for spectrography, the major problems of the ASI294MM camera are: (1) Telegraph noise (more than on the ASI183MM camera) , (2) Pixel size that is a little too large for comfortaply applied algorithm for remove the RTS noise (without destroy spatial or spectral resolution). This pixel size (4.63 microns) also offers less flexibility with regard to the use of the camera, for example the type of observation presented below is not possible if the "bin 1x1" mode (pixels of 2.315 microns) is not accessible and really operational (which remains to be confirmed). Comment: for spectrography, the best sensor I use is the Sony IMX455 which equips the ASI6200MM camera (RTS noise well controlled, no AmpGlow, 16 bits, very good cosmetic appearance, good compromise for the pixel size: 3.76 microns), but at a very high purchase cost and with a backfocus which is not compatible with many spectrographs (Alpy600, UVEX, etc.). It surely foreshadows the less expensive CMOS sensors of tomorrow.
Toujours pour la spectrographie, les problèmes majeurs de la caméra ASI294MM sont le bruit télégraphe (plus fort que sur la caméra ASI183MM) et une taille de pixels un peut trop grosse pour pouvoir combattre efficacement avec des algorithmes contre ce bruit RTS (sans détruire la résolution spatiale et la résolution spectrale). Cette taille de pixels (4,63 microns) offre moins de souplesse aussi quant à l’usage de la caméra, par exemple le type d’observation présenté c-après n’est pas possible si le mode « bin 1x1 » (pixels de 2,315 microns) n’est pas accessible et réellement opérationnel (ce qui reste à confirmer). Commentaire : en spectrographie, le meilleur capteur que j’utilise est le Sony IMX455 qui équipe la caméra ASI6200MM (bruit RTS bien maîtrisé, pas d’AmpGlow, 16 bits, très bon aspect cosmétique, bon compromis de taille de pixel : 3,76 microns ), mais d’un coût d’achat très élevé et avec un backfocus qui n’est pas compatible avec de nombreux spectrographes (Alpy600, UVEX, …). Il préfigure sûrement les capteurs CMOS moins coûteux de demain.
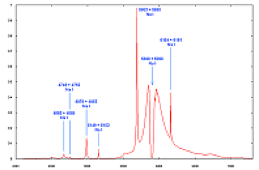
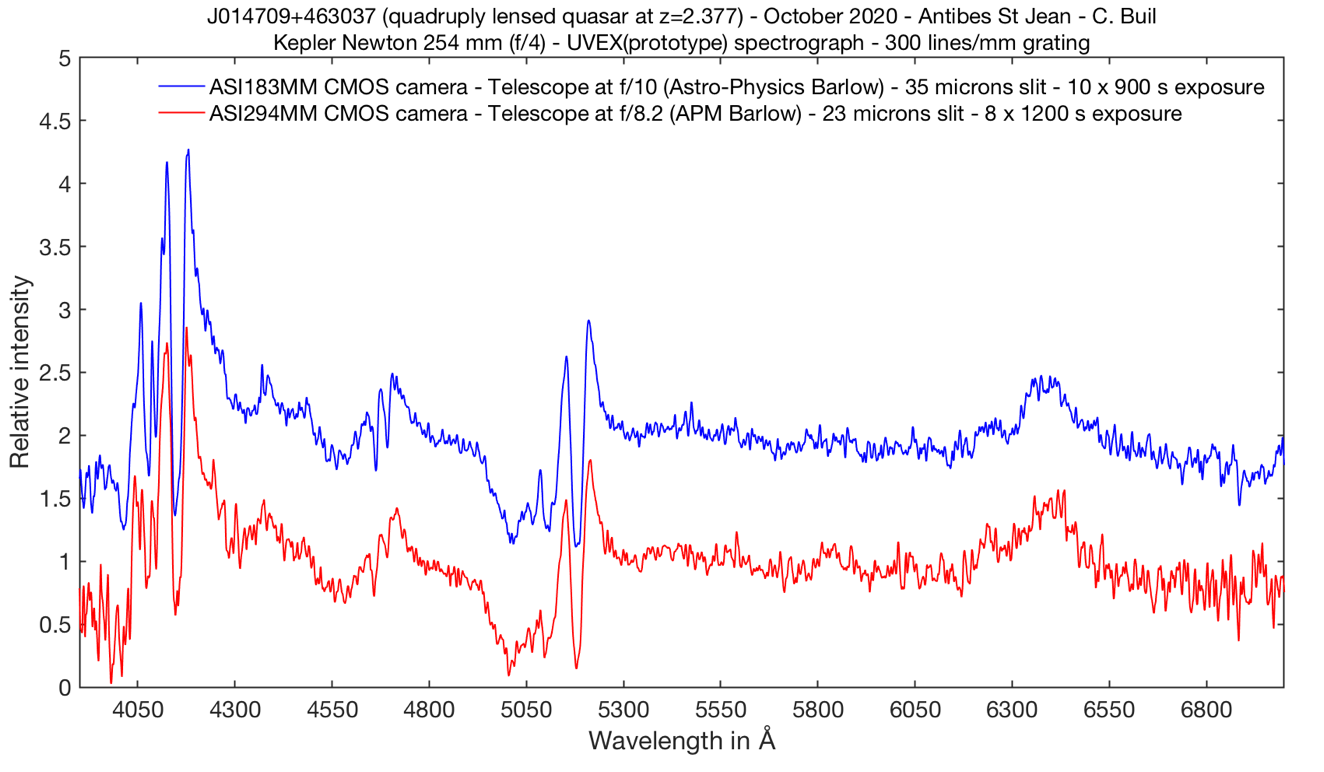
Spectrum of a star taken by using an UVEX spectrograph equipped with an ASI183MM camera and a 10 micron slit. The telescope is intentionally small (Maksutov SkyWatcher 127 mm). The resolution reaches 1800 to 4000 A and 2900 to 6563 A. This result is impossible to achieve by using ASI294MM camera due to incompatibility with the necessary sampling (Shannon or Nyquist criteria).
Spectre d’une étoile réalisée avec un spectrographe UVEX équipé d’une caméra ASI183MM et d’une fente de 10 microns. Le télescope est volontairement de petite taille (Maksutov SkyWatcher 127 mm). La résolution atteint 1800 à 4000 A et 2900 à 6563 A. Ce résultat est impossible a atteindre avec une caméra ASI294MM à cause d’une incompatibilité avec la finesse d’échantillonnage (critère de Shanon).
All of this does not mean that it is impossible o produce good spectrography by using an ASI294MM camera, but the coupling with the rest of the instrument should be well analyzed. See for example below the comparative observation ASI183MM vs ASI294MM of a quasar of magnitude 15.5 approximately (gravitational mirage, see here). The comparison is difficult because the observation conditions are not strictly identical, but it can be noted that the ASI294MM spectrum presents a good signal-to-noise ratio in blue and especially red, which is the weak point of Sony CMOS sensors. With this type of telescope (10-inch Newton F/4) used with a UVEX spectrograph, the experience feedback leads to the use of an “apochromatic” APM Barlow configured to reach an F/D between 8 and 10, a 35 microns slit and a ASI294MM (eventually improved by a filtering for the RTS filtering algorithm, like CMED method) , to finally observe very weak objects with a resolution of R = 800 around 650 nm.
Tout ceci ne signifie pas qu’il est impossible de faire de la bonne spectrographie avec une caméra ASI294MM, mais le couplage avec le reste de l’instrument doit être bien réfléchi. Voir par exemple ci-contre et ci-dessous l’observation comparée ASI183MM vs ASI294MM d’une quasar de magnitude 15,5 environ (mirage gravitationnel, voir ici). La comparaison objective est difficile, car les conditions d’observations ne sont pas strictement identiques, mais on peut relever que le spectre ASI294MM présente un bon rapport signal sur bruit dans le bleu et surtout le rouge, qui est le point faible des capteurs CMOS Sony jusqu’alors . Avec un tel télescope, Newton de 254 mm ouvert à la base à f/4, utilisé avec un spectrographe UVEX, ce retour d’expérience conduit à employer une Barlow « apochromatique » APM configurée pour atteindre un F/D compris entre 8 et 10, une fente de 35 microns et une caméra ASI294MM (éventuellement améliorée grâce à un algorithme de filtrage du RTS, méthode CMED par exemple) , pour finalement observer des objets très faibles avec un résolution de R=800 environ vers 650 nm.



Guiding camera