Optimisation du focuser Hedrick sur un CDK12.5
Le focuser Hedrick du Planewave CDK12.5
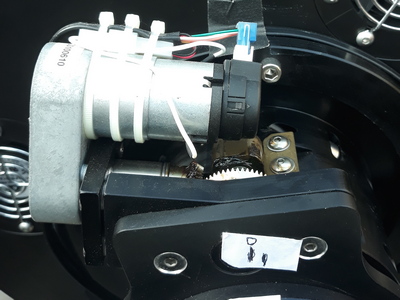
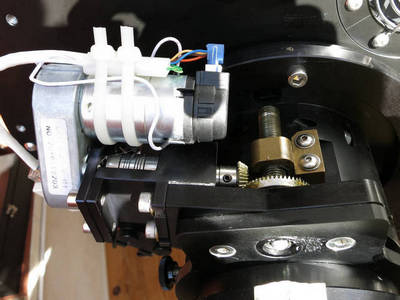
Ce focuser de type crayford est motorisé via un couple de pignons coniques à 90° solidaire de la partie mobile et relié au corps fixe du crayford via une vis de translation liée au grand pignon conique. Le moteur entraine en rotation via son réducteur le petit pignon solidaire de l'axe de sortie du réducteur. Ce petit pignon renvoie à 90° la rotation sur le grand pignon qui grâce à sa vis solidaire permet le déplacement axial de la partie mobile du Crayford.
Problématique
Le petit pignon du couple conique est fixé en bout d'une rallonge vissée directement sur l'axe de sortie du réducteur. Ce design minimise le nombre de pièces et le coût mais génère un couple radial sur l'axe lors des rotations. Ce couple est encaissé par le palier interne de l'axe de sortie du réducteur. Avec le temps, ce couple provoque une usure du palier fritté avec pour effet un battement croissant de la ligne d'arbre donc du jeu entre les deux pignons voir à terme un saut de dent.
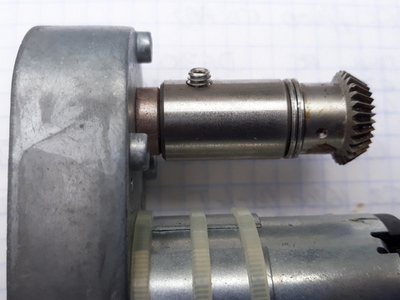
Ensemble d'origine : Moteur-Réducteur-Rallonge-Petit pignon conique
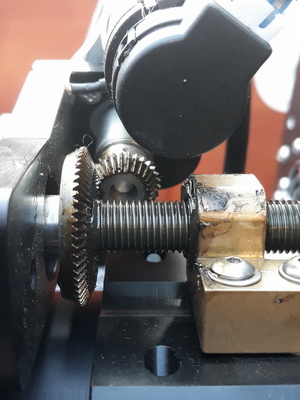
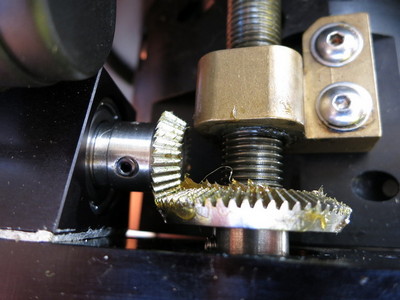
Par ailleurs, dû au design originel, les centres des cônes primitifs de rotation des pignons ne sont pas concourants avec un décalage de 1,5mm pour une largeur de contact denture de 4,5mm
Montage d'origine PlaneWave - Noter le décalage du petit pignon
Les conséquences sont :
• une imprécision dans les incréments de déplacements IN/OUT,
• une mauvaise répétabilité de positionnement absolu du focuser,
• un décalage systématique de la position « électronique » du best focus,
• un autofocus impossible à paramétrer de manière fiable,
• une usure des flancs de denture,
• une transmission de couple non optimisée.
Solution
L'idée est de partir du design originel de l'environnement du focuser PW. Cela pour minimiser la complexité et les risques mais surtout pour proposer une solution ad-on au moindre coût.
L'objectif est de reconcevoir le support moteur et sa rallonge supportant le petit pignon conique.
La solution retenue est un palier comportant deux roulements soutenant un arbre sur lequel est fixé d'un coté le petit pignon et de l'autre un accouplement flexible relié à l'axe de sortie du réducteur/moteur.
Ce montage permettra de supprimer tout battement radial du petit pignon et une position axiale fixe vis-à-vis du grand pignon. L'accouplement flexible soulagera le palier du réducteur de tout contrainte et usure.
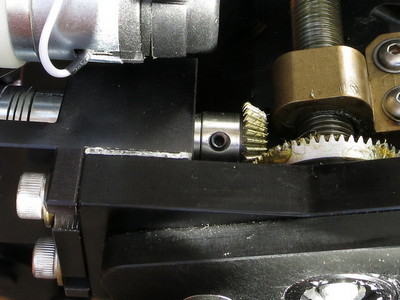
Montage avec boitier roulement et accouplement flexible
La concourance des centres des cônes primitifs impose la position axiale du petit pignon. Elle est ajustée par l'enfoncement progressif et itératif à la presse de l'ensemble roulements-arbre-pignon dans le boitier.
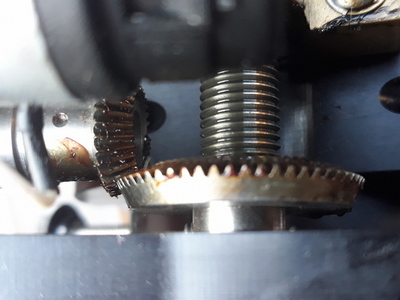
La concourance est jugée visuellement par l'alignement des deux flancs de pignons.
Ajustement axial du petit pignon vs grand pignon - Flancs au même niveau
Le jeu radial de denture est progressivement ajusté par un empilage de cales d'épaisseur 0,1mm. Ces cales sont issues de bandes de scotch aluminium d'épaisseur 0,10 mm.
Ajustement radial petit pignon via jeu de cales
Lorsque la concourance des cônes est faite et que le jeu radial de denture est minimum mais présent, le boitier est bloqué en position via le serrage des 2 vis CHC 10-32 UNF sur la patte originelle PW. La rotation du petit pignon doit se faire manuellement sans effort ni point dur en tournant l'axe de sortie coté moteur.
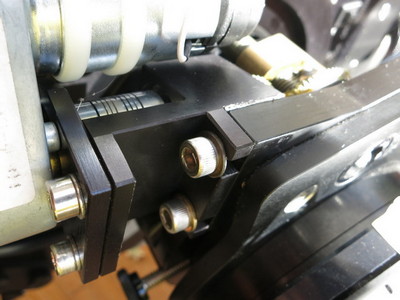
Deux vis CHc 10.32 UNFx3/4 de fixation du boitier roulement
- Si OK, graisser les dentures et faire tourner plusieurs tours pour répartir le lubrifiant.
- Si NOK (point dur), ajuster la position du petit pignon via une épaisseur de cale supplémentaire et tester de nouveau.
L'accouplement flexible est ensuite monté non serré sur l'arbre roulement. Le réducteur est vissé sur sa plaque support via trois vis TF M3-6 puis l'axe du réducteur est inséré dans l'accouplement. Cette plaque est alors bloquée par deux vis CHc sur le boitier roulement.

Accouplement flexible Ruland PCMR 19-6-6-A
Enfin, l'accouplement flexible est ajusté axialement (les fentes radiales ne doivent pas être ni comprimées ni dilatées) puis serré en position sur ses deux axes (pincement via deux vis).
Une calibration du focuser doit ensuite être réalisée selon le protocole PW.
Résultats
Avant et après le montage du boitier, le focuser est testé par pas de 100µm en IN puis en OUT. La réponse à la consigne de déplacement donnée par le soft PWI est controlée en justesse à l'aide d'un comparateur mécanique au 1/100e mm.
Le CDK est placé horizontalement et le focuser soutient son train d'imagerie standard composé d'une STL4020, d'un OAG maison avec focuser+CCD SBIG, remote guiding head, d'un AOL, d'un collier rotatif Takahashi et de plusieurs bagues d'adaptation. La masse embarquée est de 4,2 kg.
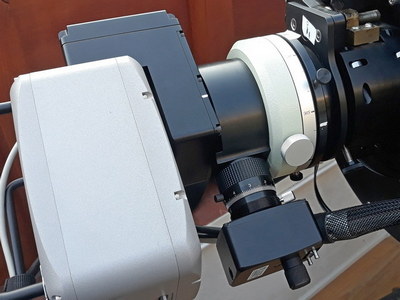
Train d'imagerie monté sur le Hedrick focuser
Le protocole de test est le suivant :
- Focuser sur sa position de focus (soit pour mon setup 9,5mm)
- Sortie du focuser (OUT) de 10 pas de 100µm
- Rentrée du focuser (IN) de 6 pas de de 100µm
- Mise à 0 du comparateur
- Rentrée du focuser (IN) de 4 x 1 pas de 100µm avec à chaque pas lecture du déplacement réel du focuser via le comparateur
- Inversion de sens : sortie du focuser (OUT) de 4x un pas de 100µm avec à chaque pas lecture du déplacement réel focuser via le comparateur --> retour au point de départ (0 comparateur).
La procédure est répétée 3 fois et la valeur moyenne de chaque pas IN et OUT est calculée.
Ce protocole a été réalisé avec le montage d'usine de Planewave puis avec le nouveau système. Le réglage de conversion encodeur/µm est celui d'usine de PW soit 115.134 step encodeur/µm et le backlash à 0 step. A noter que pour ce dernier, le réglage n'est actif qu'en OUT.
Ci-après les valeurs moyennes et le graphique correspondant :

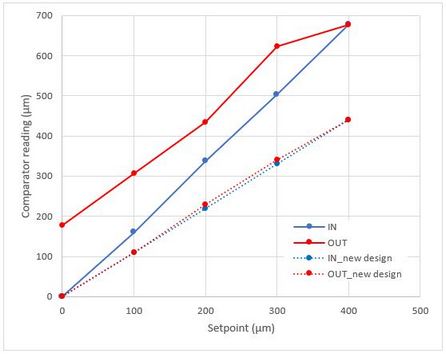
On note sur le design originel le décalage de position à l'inversion de sens de IN vers OUT. La position de retour à l'origine est décalée de près de 180µm Pour une consigne de 100µm, le pas moyen est de 147 µm +/- 87 µm (2s).
Avec le nouveau montage, les déplacements IN et OUT sont colinéaires et la position de retour est décalée de moins de 10µm. Pour une consigne de 100µm, le pas moyen est de 110 µm +/- 10 µm (2s).
Conclusion
Le focuser Hedrick est de base un crayford solide capable de supporter de lourdes charges sans flexions. Avec cette évolution, il corrige un défaut de conception et améliore grandement sa fiabilité et répétabilité.
Ce nouveau montage est adaptable sur tous les CDK12.5 en récupérant le petit pignon et le moteur/réducteur. Le pignon et sa rallonge sont montés d'origine collés à la Loctite. Leur démontage délicat ne peut se faire qu'en chauffant modérément l'ensemble avant extraction.
Merci à la société SkyMeca pour sa réactivité et la qualité de leur réalisation mécanique selon mes plans de détails.
Le coût de revient mécanique, visserie et accouplement est de 210 euros.
Enjoy !
Sur demande, je peux fournir les plans des pièces.