|
|
|
Quel télescope acheter et pour quel usage ? La qualité de la monture (IV) A côté de la stabilité et de la résistance de la monture, il faut également considérer la qualité des réglages mécaniques ou électroniques et la conception de l'ensemble. Si les plus petits instruments s'accomodent d'engrenages en teflon, les entraînements des montures de qualité sont façonnés en acier trempé ou en bronze, seuls matériaux capables de soutenir les contraintes mécaniques ou la chaleur sans se déformer. Ils sont également surdimensionnés pour augmenter la précision du suivi. Mais si les roues dentées ont fait des heureux pendant plusieurs générations, aujourd'hui cette technologie est sur le point d'être remplacée par le Direct drive fonctionnant par induction magnétique. Voyons en détail les avantages et les inconvénients de ces différentes technologies. Roues dentées, vis sans fin et motoréducteur Parmi les points à vérifier, veillez à ce que les différents axes de rotation glissent sans heurts, soient souples et très précis, que la queue d'aronde ou les contre-poids soient ajustés à leur embase ou à leur axe avec précision, que les accessoires coulissent dans leurs bagues au lieu d'y "tomber", qu'ils s'en détachent sans aucune difficulté ou que les vis de fixations soient inoxydables et n'endommagent pas le matériel. Vérifiez également les bagues de serrage qui, dans les modèles bas de gamme sont en plastique ou en fer et peuvent se déformer sous les contraintes ou rouiller sous l'humidité.
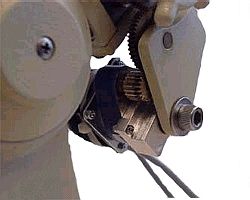
Ainsi que nous l'avons dit la plupart des montures équatoriales ou altazimutales sont entraînées par un moteur électrique, qu'il soit continu ou alternatif. L'entraînement des axes est d'ordinaire assuré par une vis d'Archimède (vis sans fin) fixée sur une roue dentée de haute précision. Des freins constitués de patins en métal, en téflon ou en plastique peuvent également bloquer les axes. C'est à ce niveau qu'on observe les plus grandes disparités de qualité entre les montures. La roue dentée de l'axe horaire par exemple est l'élément clé d'une monture équatoriale car elle assure l'entraînement durant l'observation. Elle doit donc être façonnée et ajustée avec la plus grande précision et présenter la plus faible tolérance. Il est de même de la vis d'Archimède qui l'entraîne. Pour être efficace, garantir un suivi et des corrections précises, la roue dentée doit présenter un large diamètre et doit être fabriquée dans un matériau très dense et très stable. Idem pour la roue dentée qui entraîne l'axe de déclinaison, bien qu'elle assure un rôle secondaire. Si les montures d'entrée de gamme et légères sont simplement équipées d'un moteur à pas sans réducteur, pour les montures robustes devant supporter des dizaines de kilos, il est préférable d'utiliser notamment un ensemble moteur-réducteur (un motoréducteur) pour augmenter le couple. En revanche, cette réduction supplémentaire est une source d'erreurs périodiques d'entraînement. On y reviendra. En fait, à l'exception du système Direct Drive, on reconnaît une monture de qualité à la dimension de ses axes et de ses roues dentées : les plus précises utilisent des axes en acier trempé d'au moins 65 mm de diamètre et disposent de roues dentées mesurant entre 180 et 290 mm de diamètre. Bien sûr leur prix est proportionnel à leurs performances. Mais rassurez-vous, pour vous adonner à votre passion vous pouvez commencer avec une monture à 500 € capable de supporter une petite optique de 8 kg. Kepler, Synta ou Vixen pourront déjà vous en proposer. A lire : Détails de conception des montures Axis F20a, F40a et F60a
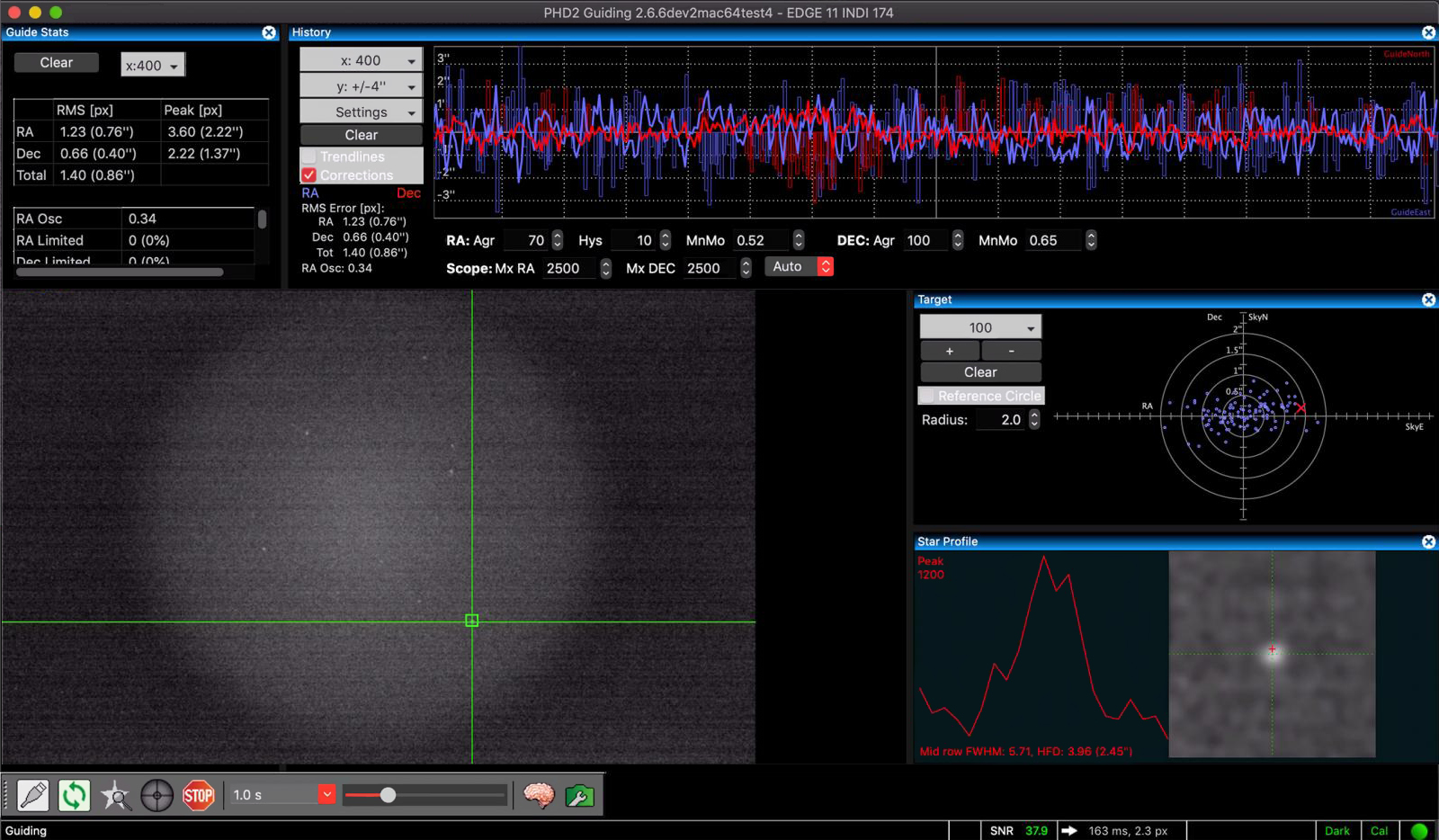
Erreurs périodiques D'un autre côté pour assurer un parfait mouvement sidéral, il faut également veiller à ce que l'entraînement soit régulier. Pour cela il faut que les roues dentées et tous les axes soient symétriques sans la moindre erreur périodique et soient donc fabriqués dans des matériaux durs et résistants avec une extrême précision et très peu de tolérances. En pratique, en utilisant des systèmes d'engrenages on ne peut pas totalement éliminer les erreurs périodiques mais on peut les réduire au minimum. En excluant la question de la qualité optique et des aberrations qui viennent ajouter leurs propres défauts et limitations, sur le plan mécanique, si les observations visuelles s'accomodent d'une petite vibration ou d'un déplacement microscopique de temps en temps, l'astrophotographie à longue pose du ciel profond exige que l'entraînement par roue dentée soit contrôlé par un moteur asservit électroniquement tenant compte des erreurs périodiques, une condition sine qua non pour obtenir des photographies de qualité sur lesquelles les étoiles restent sphériques à fort grossissement quelle que soit la durée de l'entraînement. Or en pratique on constate que la qualité des montures et en particulier de l'entraînement horaire varie en le bon et le très médiocre sans jamais atteindre des valeurs exceptionnelles. Une roue dentée ou une vis sans fin de mauvaise qualité ainsi que l'utilisation d'un motoréducteur sont autant de facteurs qui vont aggraver l'ampleur des erreurs périodiques. En effet, il faut savoir qu'une erreur de guidage de l'entraînement durant une fraction seconde produit un décalage d'une fraction de micron au niveau du plan focal. Si cela est invisible sur une photographie prise avec une optique grand champ de courte focale, avec une longue focale et à fort grossissement, les étoiles auront une forme irrégulière rendant l'image inexploitable. Cette irrégularité du guidage peut détruire la belle image que vous êtes peut-être en train d'enregistrer depuis plusieurs dizaines de minutes. Si le traitement d'image permet de rectifier certaines erreurs, il n'y a pas de miracle pour corriger des vibrations, un filé ou une aberration trop accentuée sur une photo. A lire : Comparatif des erreurs périodiques des montures équatoriales par C.Demeautis, 2007 Logiciel PEMPro, CCDWare Réduit les erreurs périodiques de certaines montures
Finalement, il ne faut pas oublier que si l'apparence massive d'une monture peut convaincre un novice, cet aspect ne garantit pas la précision de l'entraînement ni la stabilité de la monture. La précision mécanique, la taille des axes, la dimension des roues dentées, les tolérances, la puissance des moteurs d'entraînement et la conception de l'ensemble restent les facteurs primordiaux à vérifier avant d'acheter une monture aussi imposante et flâtteuse qu'elle soit au premier regard. Moteur à pas et encodeurs Les moteurs qui entraînent les axes des montures des télescopes présentent parfois des performances insuffisantes quand on recherche un maximum de précision. Ils consomment également assez bien d'énergie car ils exigent une certaine puissance, ce qui peut rapidement épuiser les piles ou la batterie si vous n'avez pas d'alimentation secteur à proximité. Astro-Physics par exemple qui vend également un contrôleur vocal, propose de remplacer les moteurs ordinaires par des servo-moteurs. Il s'agit de moteurs à courant continu pilotés en boucle fermée, c'est-à-dire qu'à tout moment le contrôleur sait ce qui se passe au bout des axes et connaît donc la position de l'instrument.
Concrètement, cela signifie que les variables de vitesse, accélération et angle sont envoyées directement aux moteurs fixés sur les roues dentées du télescope. L'encodeur faisant office de tachymètre ou d'accéléromètre réagit proportionnellement aux mouvements et retourne une valeur représentative en temps réel au système de contrôle. La boucle est ainsi fermée. Cette technologie équipe aujourd'hui la plupart des systèmes GoTo. Livrés avec des encodeurs, ceux-ci offrent moins de précision mais ils offrent l'avantage de fournir un couple plus élevé à grande vitesse et potentiellement une meilleure précision tout en consommant moins d'énergie. Ce système est toutefois limité par la précision mécanique des engrenages et il peut abandonner une poursuite si le tube est déplacé accidentellement (comme c'est le cas également avec les cercles digitaux, raison pour laquelle les axes doivent être parfaitement bloqués). En revanche, ce type d'encodeur est plus efficace s'il est lourdement chargé car les moteurs vont ralentir et c'est ici que les corrections électroniques prendront le relais avec une très haute précision. Enfin, il y a les systèmes utilisant des moteurs à pas ou steppers. Il s'agit également de moteurs à courant continu mais impulsionnels en boucle ouverte. Ils tournent d'un certain angle et dans un certain sens en fonction du nombre d'impulsions reçues sans le moindre retour d'information aux encodeurs. On suppose donc que le moteur aura avancé du nombre d'impulsions requis mais on en est pas certain; c'est une boucle ouverte. Ce système fonctionne très bien à condition que les moteurs soient peu chargés. Sur une monture équatoriale, ces impulsions étaient à l'origine déterminées à partir de la durée de rotation de la Terre sur son axe (23h59m4s), c'est le principe même de l'entraînement horaire traditionnel. Les systèmes de guidage modernes sont toutefois capables de meilleures performances; ils sont par exemple capables de contrôler dynamiquement le taux de rotation des moteurs en fonction des effets de la réfraction atmosphérique ou des erreurs mécaniques de la monture. Comme nous l'a démontré Mel Bartels, on peut utiliser les moteurs à pas avec une monture altazimutale ou un télescope dobsonien à condition de le piloter à partir d'un ordinateur, car seul un processeur associé à un programme de guidage peut gérer les rapports constamment changeants des moteurs installés sur ce type de monture. Revers de la médaille, les moteurs à pas génèrent moins de couple, ils peuvent engendrer des vibrations et entraîner une dérive des coordonnées s'il n'y a pas de retour de position par l'encodeur. Les anciennes consoles GoTo Sky Sensor 3 de Vixen par exemple fonctionnaient selon ce principe et n'étaient pas capables de localiser les objets à coup sûr à moins de 10° ! Les modèles plus récents ont heureusement corrigé tous ces défauts de couplage entre les moteurs et la monture. Pour remédier au manque d'information sur l'état des moteurs, les constructeurs utilisent des encodeurs qui retournent l'information de la position du télescope. On passe ainsi en boucle fermée.
Pour supprimer les vibrations et les mouvements saccadés, ils utilisent la technologie micropas (micro stepping) qui consiste à modifier la puissance des moteurs en utilisant une fréquence d'avance des pas d'environ 8 kHz, suffisant élevée pour passer inaperçue à l'oculaire. Ainsi Francis Tisserant peut se venter d'avoir construit un dobsonien de 254 mm f/5.8 dont la résolution des micropas est de 0.12". Ce mouvement est extrêmement lisse et impossible à mettre en évidence sur une photographie. Cette technique utilise cependant des tensions relativement élevées et les contrôleurs commerciaux qui les gèrent sont très onéreux. En revanche, une solution "maison" comme celle proposée par Mel Bartels coûte moins de 400 €. Techniquement parlant, les servo-moteurs sont conseillés pour les actions requérant des mouvements très doux sur une large gamme de vitesses d'entraînement, mais ils sont plus chers que les simples moteurs à pas, bien que meilleur marché que les systèmes entièrement à micropas, pour ne citer que le système GoTo d'Astro-Physics ou Gemini pour les montures Losmandy. Inconvénients de l'entraînement par roue dentée Jusqu'aux années 1990, les instruments d'astronomie étaient équipés de roues dentées avec pignon et autre vis sans fin. Si cette solution est encore très répandue, elle présente certains inconvénients pour l'astrophotographie à longue pose. - Le système d'engrenages nécessite des réglages de pression et des tolérances de jeux qui, s'ils sont mal ajustés, peuvent provoquer des vibrations du tube optique voire conduire au bloquage du système de pointage. - Le système est mal adapté aux corrections en déclinaison en raison des jeux indispensables pour les mouvements en sens alternés qu'il est impossible de compenser facilement. Il est également sensible au vent pour la même raison. - Les roues dentées présentent des erreurs périodiques qu'il faut corriger si on veut réaliser un guidage précis en haute résolution - Un entraînement par roue dentée ne peut pas être réglé d'usine mais uniquement sur le lieu d'observation.
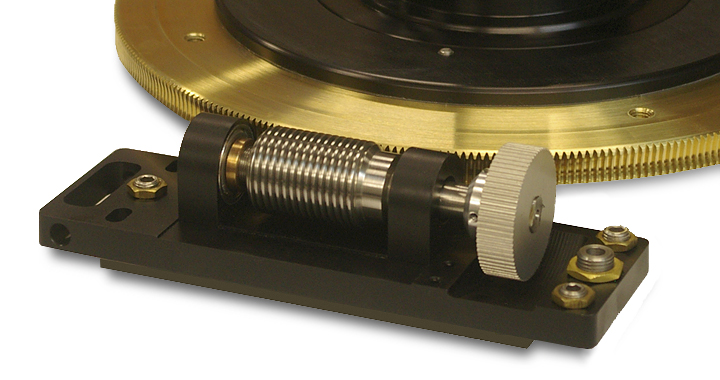
Roue dentée en bronze de 380 mm de diamètre et vis sans fin en acier trempé de Mathis Instruments. - La roue dentée s'use par friction, de même que les paliers de la vis sans fin. - Les moteurs à pas sont bruyants et grinçants lors du balayage rapide du ciel, certains ayant même une fréquence en résonance avec la monture. - Les moteurs consomment beaucoup d'énergie lors des mouvements lents, le rendement du système étant très faible comparé à d'autres mécanismes. - Le pointage et le suivi sont relativement peu précis sur les systèmes à boucle ouverte. - Enfin, une tête équatoriale munie de roues dentées de haute précision est très chère pour un résultat qui ne dépasse pas une précision d'environ 1". Pour résoudre tous ces problèmes, les électromécaniciens ont inventé le système Direct drive ou moteur couple entraîné par un champ magnétique. Le système Direct drive Au début des années 1990, grâce au développement de microprocesseurs plus puissants, les industriels ont développé des montures altazimutales et équatoriales allemandes asservies non plus par des roues dentées et des pignons mais par un pilotage informatisé direct des axes au moyen d'un moteur générant un couple électromécanique grâce à l'induction d'un champ magnétique : c'est le système Direct drive ou moteur couple. Ce concept demande quelques explications.
Au coeur du système Direct drive se trouvent des moteurs constitués d’un rotor et d’un stator qui s'adaptent directement aux axes de la monture, sans aucune pièce mécanique de liaison ni aucun motoréducteur de vitesse. Ces moteurs sont des dispositifs synchrones équipés d'aimants permanents montés mécaniquement (sans colle). Ces aimants sont fabriqués à base de néodyme qui leur confère une forte puissance et de hautes densités de couple, y compris à grande vitesse grâce à des rotors très performants à faible coefficient de pertes. Chez Phase Automation le stator est refroidi par eau pour améliorer ses performances et garantir une puissance constante. Le principal avantage du système Direct drive est d'offrir un couple très élevé, d'où son nom de "moteur couple", y compris à haute vitesse. Ainsi, il peut en théorie balayer un champ de 100° en 1 seconde (en pratique on se contente de 10 à 30°/s) comme il peut suivre un objet se déplaçant de 0.1" par heure. Par rapport aux roues dentées, grâce à l'utilisation d'aimants permanents et d'encodeurs absolus de haute précision et vitesse (HPS), le Direct drive présente également une très grande rigidité angulaire des axes (il supporte même un déséquilibrage de l'OTA). Il est également équipé de freins qui s'activent automatiquement lorsque la monture est hors-tension pour éviter tout risque de mouvement du tube optique, la position des axes étant conservées par les codeurs optiques qui pilotent les moteurs. Ces codeurs optiques présentent une très haute résolution avec 63500 marqueurs sur la roue de 200 mm de diamètre d'Alcor System. Leur système le plus précis permet d'atteindre une résolution de 0.015" par pas soit environ 63 millions de pas par tour (contre 1 ou 2" pour une roue dentée de qualité) grâce à une boucle fermée fonctionnant jusqu'à 10 kHz dont le système est capable de récupérer les vibrations provoquées par le vent. Le système Direct drive de la gamme TK de Phase Automation offre une résolution de 0.026" par pas, ce qui représente plus de 48 millions de pas par tour. Le Direct drive peut donc suivre un astre avec la même précision, et cela sans autoguidage. Concrètement, ce niveau de performance assure un pointage précis et un suivi parfait et différentiel, ce qui permet de suivre n'importe quel objet se déplaçant dans le ciel, qu'il soit lent ou très rapide et même de compenser l'effet de la réfraction atmosphérique qui déforme les images. Du fait de ses performances et de sa relative simplicité de fabrication, ce type d'asservissement a rapidement trouvé des applications dans tous les domaines exigeants un entraînement direct précis et très performant, et notamment au sein des plus grands observatoires. En effet, le système Direct drive a été choisi pour asservir la monture des télescopes de 8.2 m du VLT en 1992 et du futur E-ELT de 42 mètres de diamètre de l'ESO. Ce système équipe également de nombreux télescopes de 400 mm à 2.5 mètres de diamètre dont le télescope TRAPPIST robotisé de 600 mm f/8 de l'Université de Liège installé à La Silla au Chili. Voici en résumé les avantages et les inconvénients du système Direct dricve :
Avantages du système Direct drive : - Pas d'éléments mécaniques : pas de roue dentée, pas de vis, pas de roulement - Pas d’usure mécanique et donc pas de panne mécanique - Simplification de la conception mécanique de l’entraînement - Transmission de la force par champ magnétique - Pas de connexion mécanique entre le rotor et le stator - Pas de balais - Encodeurs absolus à haute performance - Pointage rapide et précis du télescope en raison du couple élevé et de la faible inertie des aimants permanents - Suivi parfait des astres sans autoguidage - Grande efficacité : pas de pertes par friction par transmission mécanique - Couple élevé à faible vitesse de rotation - Vitesse de balayage de 100°/seconde à 0.1"/heure - Aucune erreur périodique et donc pas besoin de "PEC" - Longue durée de vie en raison du peu de pièces mobiles sujettes à panne, usure ou contrainte - Bruit réduit : peu de pièces mobiles en résonance ou sujettes à vibrations - Entraînement régulier : pas d’hystérésis, pas de jeu (backlash), pas d’élasticité - Asservissement en boucle fermée sur un encodeur de 8 à 10 kHz - Faible consommation (5 W par axe) - Forme du moteur adaptable à l'application (grand diamètre et faible longueur ou petit diamètre et allongé) - Couple de 10 Nm à plus de 150000 Nm (3000 à 350 t/min) et puissance pouvant dépasser 1 MW - Rotation des axes à vitesse différentielle selon le modèle de pointage et l'effet de la réfraction atmosphérique Inconvénients du système Direct drive : - Moteur spécial transférant la force par champ magnétique - En raison du couple à basse vitesse, le diamètre du moteur (rotor/stator) est plus grand que celui d'un moteur à engrenage - Requiert une boucle fermée pour réduire notamment les ondulations dans le couple (cogging) - Electronique délicate et logiciel perfectible - Electronique assez encombrante (mais miniaturisable si on y met le prix) - Un moteur couple est plus cher qu'un moteur à engrenage pour les grands télescopes (500 mm de diamètre et plus). A lire : Motorisation Direct drive pour nos télescopes (PDF, 13 MB) Revue des différents types de motorisation par C.Cavadore, Alcor-System, 2014
Le Direct drive : un produit d'avenir Si l'entraînement Direct drive est utilisé dans l'industrie depuis plusieurs décennies (éolienne, pompe moteur, compresseur, ventilateur, lave-linge, tourne-disque, porte de garage, etc), dans les années 2010 la technologie Direct drive s'est démocratisée et a depuis lentement pénétré l'univers des astronomes amateurs. Après des débuts timides, aujoud'hui de nombreux constructeurs proposent ce type d'entraînement pour les télescopes : 10Micron (Italie), Alcor System (France), ASA (Autriche), Astelco (Allemagne), GTD (USA), PlaneWave (USA), SkyVision (France), etc. Notons qu'Alcor System et SkyVision travaillent en partenariat avec Optique Unterlinden.
En revanche de grands constructeurs comme Astro-Physics, Celestron, Vixen ou Takahashi n'ont pas franchi le pas. La raison est double. D'une part ils sont spécialisés dans les optiques et non dans les montures qui, à quelques exceptions près, ils achètent à des sous-traitants et d'autre part, il y a l'aspect financier qui vient vite exploser le montant de la facture. En effet, une monture Direct drive revient au moins à 8000 € sinon 50 % de plus et les plus petits modèles supportent 25 kg hors contre-poids et accessoires qui représentent 5 à 10 kg supplémentaires. C'est suffisant pour supporter le poids d'une grande lunette apochromatique de 130 mm de diamètre (~8 kg) ou un télescope catadioptrique de 355 mm de diamètre (~20 kg). A ce prix il faut ajouter celui de l'OTA qui sera forcément une optique de très bonne qualité et les accessoires (CCD, oculaires et ordinateur), portant la facture totale au minimum à 14000 € ttc. Vu le montant de la facture, la plupart des amateurs pousseront donc probablement un soupir ou feront la grimace. Il est vrai que pour un amateur peu fortuné, le Direct drive reste une solution très onéreuse comparée à ce qu'on peut trouver sur le marché. En effet, pour environ 9700 € ttc on peut acheter un télescope catadioptrique complet Meade ACF LX200 de 355 mm UHTC sur monture altazimutale chez Astroshop.eu. Bien sûr, par défaut les erreurs périodiques de la monture de ce catadioptrique seront dix fois supérieures à celles des montures Direct Drive mais des systèmes d'autoguidage peuvent y remédier. Dans une autre catégorie de prix, on peut aussi acheter un Dobsonien de 400 mm f/4.4 GoTo pour moins de 2500 € chez Optique Unterlinden, voire même moins cher en promotion. Pour un montant encore inférieur, l'amateur ayant des compétences techniques en électromécanique et en programmation peut aussi fabriquer lui-même le moteur Direct drive et son système de contrôle comme le propose l'auteur du site Astronomy Alysum, Dan Gray ou Teamtestbot. En résumé, le choix de la monture et de son système d'entraînement dépendent une fois de plus du budget et du temps que vous pouvez consacrer à ce hobby (sans oublier le facteur météo) plus que de la qualité et des performances idéales que vous désirez atteindre, lesquelles sont largement au-dessus des moyens de la plupart des amateurs. A défaut d'argent ou de compétences, il faut donc faire des compromis. Mais on peut éviter de tomber dans le bas de gamme en contournant le problème et en cherchant sur le marché des instruments équipés d'options ingénieuses (télescope en kit, GoTo universel, optique adaptative, autoguidage, etc.) offrant des performances inattendues à des prix relativement démocratiques. Prochain chapitre Le trépied dans tous ses états
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||



















{kind=link}
{kind=link}