

Mise en place de l'autoguidage
Interface
ASCOM ST4/USB
Le
plus compliqué, lorsqu'on a un télescope de fabrication
personnelle est bien sûr d'interfacer le télescope avec
le logiciel de guidage. Pour ma part, j'utilise l'interface ZWO,
achetée chez Pierro-Astro qui m'a donné quelques
indications pour le montage. Merci à lui.
Mais cela ne suffit pas. Comme j'avais réalisé mon électronique et ma raquette de commande sur la base de circuit NE555, l'interface ne me sert à rien en l'état. Cette interface fonctionne avec des optocoupleurs, qui mettent des bornes AD+ AD- D+ et D- à la masse.

Ma raquette de commande permet de mettre en parallèle sur mon circuit de commande, des résistances ou des condensateurs.

Chaque bouton poussoir doit être « remplacé » par un microrelais. J'ai donc fait une petite plaque avec un régulateur de tension en 6v, 4 relais double, et quelques résistances et condensateurs. La masse du montage a été reliée à la masse de l'interface, et les bornes positives des relais aux entrées AD+, AD-, D+ et D- par l'intermédiare du câble fourni et d'une prise femelle RJ12 insérée dans mon circuit de commande.


Mon télescope est de ce fait piloté par la raquette classique et par l'interface USB/ST4. Dans la pratique, je débranche la raquette avant de lancer l'autoguidage car il semble que les vitesses de corrections soient impactées par la présence de la raquette.

Caméra et logiciels
J'utilise une PLA-Mx, PHD guiding et PHD max. Merci aux concepteurs de ces logiciels !
Flexions différentielles
Les premiers essais ont montré un bougé, assez aléatoire, sur les images prises au foyer. La caméra de guidage était sur le télescope guide, un 115/900 reconditionné (la caméra n'est pas sur la photo).

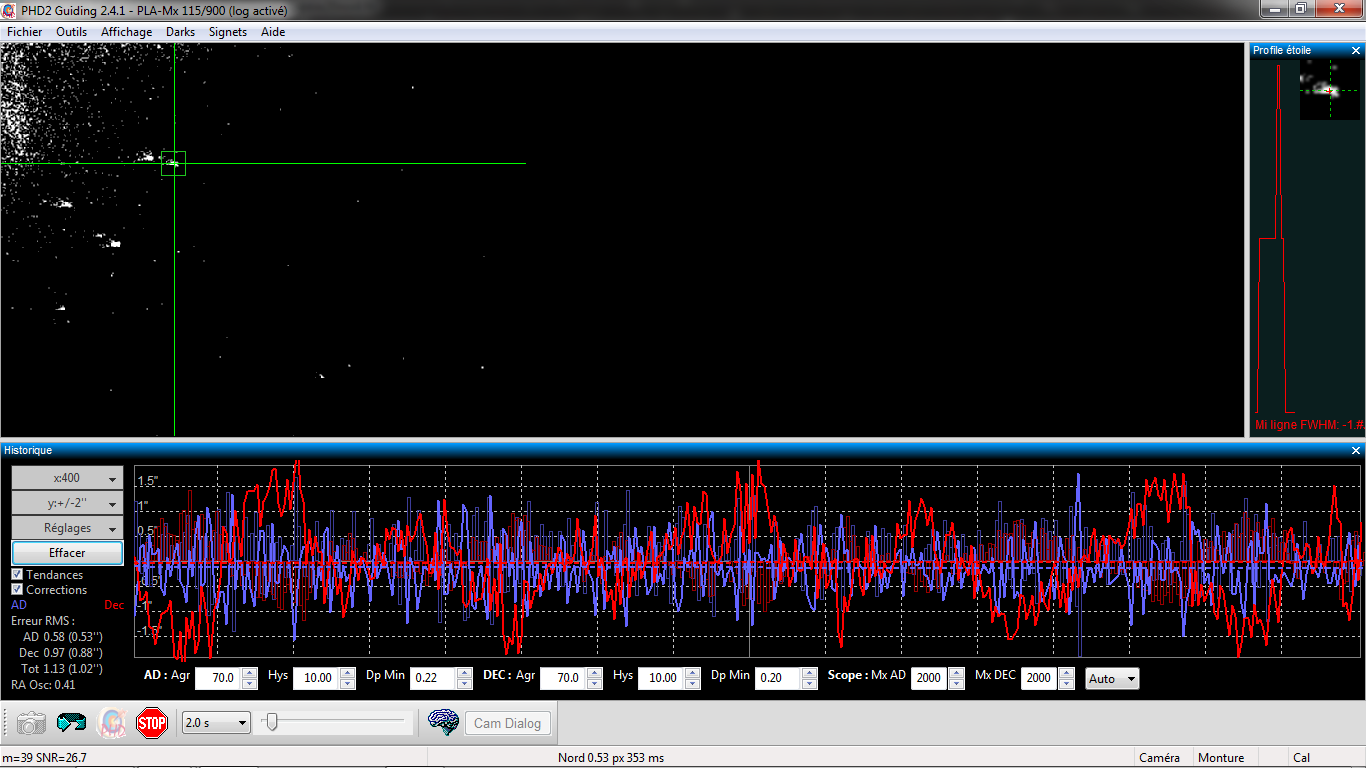
Mais après tout comment être sûr que ce sont des flexions qui sont en jeu, et pas tout autre chose? J'ai fait des poses de 2 mn avec et sans autoguidage. Dans le logiciel PHD guiding, la valeur "RMS" donne la moyenne des écarts de suivi en seconde d'arc. Une seconde d'arc correspond 6 microns au foyer du télescope.
Avec autoguidage la valeur du RMS est de 0,64" soit environ 4 microns sur l'image finale alors que les pixels de la caméra font 9 microns.

On peut donc s'attendre à des étoiles bien rondes, d'autant plus que les étoiles couvrent plusieurs pixels. Mais malheureusement, il n'en est rien (il s'agit d'une seule pose prétraitée). Les données de PHDguiding ne peuvent pas expliquer un tel bougé de 3 pixels environs soit 27 microns ou 5"!

Sans autoguidage, par ailleurs, le télescope donne de belles images. En voilà une, parmi une série de 10 toutes de même qualité, faites le même soir, dans les mêmes conditions.

J'ai débranché le câble qui permet à PHD guiding de faire les corrections, cela permet d'avoir les données quand même. Et surprise, les données sont très mauvaises (attention, changement d'échelle). La valeur RMS est de 15" soit une dizaine de pixels. Sur les images, on a un bougé de 1pixel max soit 1,45".

J'en
ai donc conclu que j'avais bien des flexions différentielles
puisque peu de bougé au foyer du télescope correspond à
un bougé important au foyer de l'instrument guide et
inversement. Les deux tubes bougent l'un par rapport à
l'autre. En fait, ça peut être très compliqué
(barillet du primaire, flexion du gros tube etc...). Mais en tout cas
ça bouge...
J'ai
donc ressorti la platine photo des années 90, mais le problème
c'est qu'on perd de la lumière et je ne suis pas sur de
trouver des étoiles guides partout sur le ciel... Le montage,
provisoire, permet de mettre la caméra de guidage directement
au foyer de l'instrument principal, juste à coté de la
caméra de prise de vue. Sur la photo, la caméra de
guidage est sur la droite, maintenue par du contreplaqué.

Le faisceau est dévié à l'intérieur de la platine par un prisme. Le contreplaqué sera remplacé par un montage plus académique et d'ailleurs la position de la caméra de guidage légèrement modifiée. Mais bon, en attendant les deux caméras ont un mise au point commune (on voit les deux capteurs, un en direct, l'autre dans le prism).

On comprend que quelques soient les flexions de la monture ou du tube les deux capteurs seront affectés de la même façon. Et le résultat est là pour l'attester :
Bubble nébula, 9x20mn avec l'audine, UHC+L.

En revanche, le rms dans PHD guiding est légèrement moins bon. C'est sûrement dû à la forme des étoiles loin de l'axe optique.
On voit sur ce graphe que la courbe de déclinaison a une forme inattendue. Normalement, il devrait y avoir une lente dérive, rattrapée de temps en temps. Il y a là une espèce d'oscillation. J'ai fait l'hypothèse que cela était dû au montage mécanique en déclinaison : les deux axes sont seulement posés dans des U. Cela implique des frottements importants. On peut raisonnablement supposer que lors des rattrapages en déclinaison, le tube ne bouge pas dans un premier temps, le bras de déclinaison se met en tension, puis tout un coup les frottements cèdent et le bougé est supérieur à celui escompté. Ensuite, il se passe le même phénomène dans l'autre sens. J'ai donc décidé de monter des roulements sur l'axe de déclinaison.
 &&
&& &&
&& &&
&&
Cela n'a malheureusement pas changé fondamentalement les choses.
Un élément plus décisif a été la mise en place d'un miroir plan à la place du prisme pour dévier le faisceau principal jusque sur le capteur de la caméra guide. Cela a permis en outre d'incliner l'axe de la caméra de suivi. La platine entière peut tourner sur son axe et cela facilite la recherche d'une bonne étoile guide, ce qui est finalement assez décisif dans la qualité du guidage.
 &&&&&&
&&&&&&
De plus, la pince en déclinaison a aussi été rigidifiée. Les assauts du vent sont beaucoup moins sensible et le jeu est réduit. Les derniers essais donnent ce genre de graphe :

On voit que cela s'est globalement amélioré et que l'étoile guide a une meilleure forme. Cependant, on remarque encore une disparité importante entre la valeur rms en AD et celle en D.
Il existe un backslach important. Le logiciel de guidage doit envoyer des informations pendant très longtemps lorsque le rattrapage change de sens (nord/sud). Cela est sans doute dû au jeu entre l'axe de la vis de rattrapage en déclinaison et l'axe du moto-réducteur. Quand finalement le déplacement du télescope a effectivement lieu, c'est généralement trop fort. Il me fallait donc réduire au maximum le backslach. J'ai d'abord mis un système de rattrapage de jeu sur l'axe du réducteur. Celui-ci a en effet un jeu de 1° à 2° sur le dernier étage de réduction. Une simple ficelle, enroulé sur cet axe, tendue à l'autre bout par un ressort, permet d'annuler le jeu du réducteur.

Cela ne s'est pas avéré suffisant, même si une amélioration était perceptible. Même si les défauts sont désormais très petits, on voit que la courbe en déclinaison est moins bonne que celle en AD.

La dernière amélioration a consisté à mettre un ressort pour annuler le jeu en rotation de la vis (récupérée sur un appareil scientifique dont la butée ne tourne pas sur elle-même). Mais même si le jeu était extrêmement réduit, il restait non nul. En tout cas, l'ajout d'un « ultime ressort » a permis de faire passer les écarts en déclinaison au même niveau que ceux de l'AD. Donc un ressort pour rattraper le jeu de l'axe motoréducteur (en haut), un autre pour le jeu de la butée en rotation (petit, au milieu) et un troisième (horizontal) pour annuler le jeu de la pince sur la butée.

