
Inicio
Pruebas de Óptica Activa bimotor con lámina refractora
(OaBimotor)
A. Pulido 11-12-2014
Modificado 18-12-2014
Aviso: si no le gusta el astro-bricolaje, no siga leyendo. Esto no es para usted. Sufrirá inútilmente.
Los orígenes:
La idea de desarrollar un sistema "open source" de óptica activa (OA o AO) y de construcción asequible para el aficionado la dió Juan Antonio León en agosto 2014 en el foro Astrohenares (http://www.astrohenares.org/foro/viewtopic.php?t=3531&postdays=0&postorder=asc&start=0).
Evidentemente la idea me pareció estupenda y en lo que puedo trato de participar en el proyecto.
Aprovechando dos de los actuadores PAP comprados por Juan, me puse a construir un prototipo o mejor dicho un banco de pruebas muy elemental para experimentar y ver cómo de factible es el proyecto. Sobre todo que no todas las AO del mercado son excelentes que digamos. O sea que de entrada muy-muy fácil no parece el asunto.
Además de la simple curiosidad también económicamente podría tener sentido ya que los sistemas AO del mercado rondan los 1000 euros.
Las cosas claras; lo que es y lo que no es:
De entrada precisar que lo que he tratado de hacer NO es un sistema de OA directamente utilizable por el astrofotógrafo aficionado. Es simplemente un artilujio (OaBimotor) que me ha permitido :
** Construir una mecánica con un objetivo, una webcam y una lámina refractora entre ambos.
** Orientar la lámina refractora con los dos actuadores accionados por un Arduino.
** Comunicar el Arduino con el programa de guiado PHD2 utilizando los comandos tipo SX-AO.
** Hacer pruebas de guiado AO en "laboratorio" con resultados positivos.
** Animar a otros cacharreros a seguir adelante y construir una OA realmente operativa.
La mecánica:
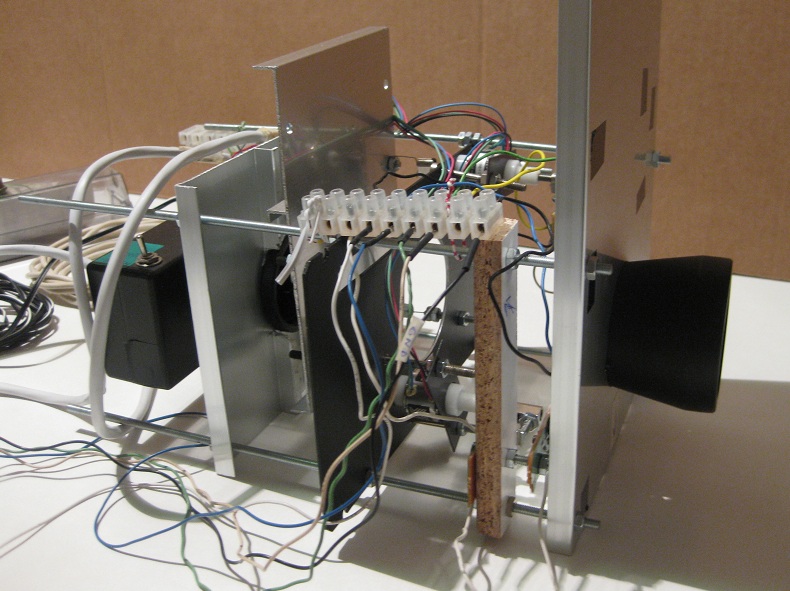
Como se ve en las fotos, se trata de cuatro trozos de varilla roscada que sirven de esqueleto al conjunto. Una placa de aluminio que soporta el objetivo, otra placa que soporta la Toucam, y una tercera placa con los dos actuadores pap. Una cuarta placa lleva la lámina refractora y es accionada por los dos actuadores.

De izquierda a derecha: el objetivo de un prismático, la placa soporte de los motores, la placa soporte de la lámina de metacrilato, la cámara Toucam.


La lámina de metacrilato.
Al igual que en la AO-L de Sbig, la oscilación de la lámina se hace actuando sobre dos puntos del soporte. Un tercer punto "fijo" hace de pivote.
Además hay cuatro interruptores fin de carrera, dos por motor. Las uniones eje-motor con la placa soporte de la lámina están hechos con hilo de acero (cuerda de piano). El acero flexiona suficientemente y no introduce holguras.

El pivote de apoyo.

Los interruptores de fin de carrera.

El conjunto trabaja dentro de una caja de cartón para protejerlo de la luz ambiente.

El Arduino y su mochila:

Esquema de la mochila con los drivers.
Dos circuitos L293 sobre un trozo de placa perforada mueven los motores por medios pasos (mpasos en lo que sigue) según programa del Arduino.
El software del Arduino:
En el PC, el programa de guiado (PHD2 por ejemplo) envía por el puerto USB las correcciones al Arduino.
El programa del Arduino es un simple bucle que lee el puerto serie (USB) y según los comandos que recibe mueve los motores.
Pantallas de las pruebas:
Las pruebas las he hecho con una "imagen-cielo" de estrellas abierta con Paint en la parte baja de la pantalla del PC. Las ventanas del PHD2 ocupan el resto de la pantalla. La OAbimotor apunta a la pantalla desde un metro y medio de distancia. Hay un ligero temblor de la mesa y de la misma pantalla que hacen que la simulación de estrella sea muy realista.
La Toucam captura la estrella guía para el PHD2 con exposición de 0,1 segundo. El PHD2 hace una corrección de guiado cada 0,2 s (5 Hz).
Para mover la estrella guía, selecciono un trozo de la imagen-cielo desde Paint y le doy a las teclas cursor. Debido al aumento de la óptica, el desplazamiento de 1 pixel de la "imagen-cielo" se traduce en un desplazamiento de varios pixeles el la Toucam.

Captura de pantalla durante las pruebas. En la gráfica se ve muy bien como se corrigen las desviaciones de la estrella guía .

Dos trozos de los logs que graba el PHD2.
Se ve que está guiando a 5 Hz, y que el OAbimotor tarda unos pocos milisegundos en ejecutar el comando recibido desde el PHD2.
Características del sistema:
Las características interesantes a efectos de guiado medidas con este sistema son:
** Desplazamiento de la imagen por mpaso del actuador (resolución) = 0,53 um por mpaso. Recuerdo que un mpaso == medio paso de actuador.
** Desplazamiento total de la imagen (amplitud) = +/- 0,169 mm (para +/- 320 mpasos)
** Velocidad de desplazamiento (velocidad) = 0,263 mm/s (10 um en 38 ms)
** Tiempo de respuesta medido con PHD2 (desde que el PHD2 envía el comando hasta que recibe el OK):
-- para desplazamiento de 10 um = 47 ms.
-- para desplazamiento de 50 um = 202 ms.
Estas medidas del desplazamiento las doy en mm y no en grados para que sea más fácil comparar distintos sistemas entre sí independientemente de la focal del tubo utilizado o del tamaño de los píxeles de la cámara.
Comparación con Ópticas Activas comerciales:

Comparativa entre las distintas OAs.
Conclusión:
El parámetro que peor queda en esta comparativa es la velocidad. Sin embargo tenemos una resolución muy pequeña. O sea que moviendo los motores con mayor velocidad se llegaría a un sistema perfectamente válido.
Además queda lo más importante que es ir hasta el final y construir una OA que se pueda acoplar a un telescopio de verdad. En todo caso queda claro que los aficionados podemos hacer una óptica activa.
http://www.astrosurf.com/pulgar
Inicio