
|
|
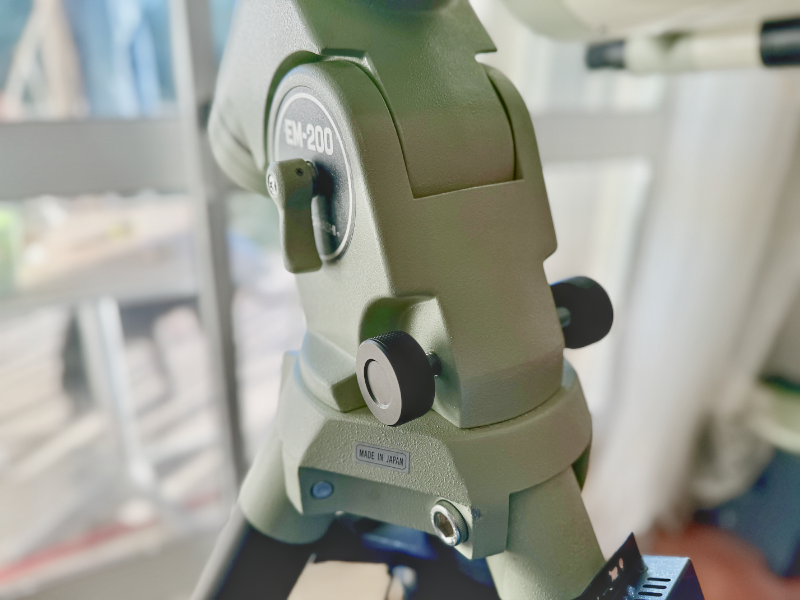
As montagens EM-200 foram introduzidas pela a primeira vez em 1995. É feita num bloco massivo de alumínio fundido em moldes de barro (Youtube).
| Takahashi EM-200 | | Equatorial |
| Eixo Declinação | | roda dentada Ø 92mm 180:1 |
| Eixo Ascensão Recta | | roda dentada Ø 92mm 180:1 |
| Ajuste azimutal | | Dupla rosca, ± 15° |
| Ajuste altitude | | Tipo rosca, altitude 0°~50° |
| Escalas (mínima) | | Ascensão Recta: 10' / Declinação: 2° |
| Motorização | | Dois eixos, controlo por quartz, erro de rotação ± 0.05%, frequência 100PPS |
| Codificadores (Encoders) | | AR: Microtech Laboratory MES-20-200P 9" / Dec: MES-20-300P 6" resolução |
| Precisão de seguimento | | 土 5", período 8 minutos |
| Peso | | 15.5 kg |
| Carga máxima | | ~16.0 kg |
| Eixo de contrapesos | | retráctil, veio Ø 18mm |
| Acessórios incluídos | | contrapesos 2x5kg, comando manual, cabo RS-232 |
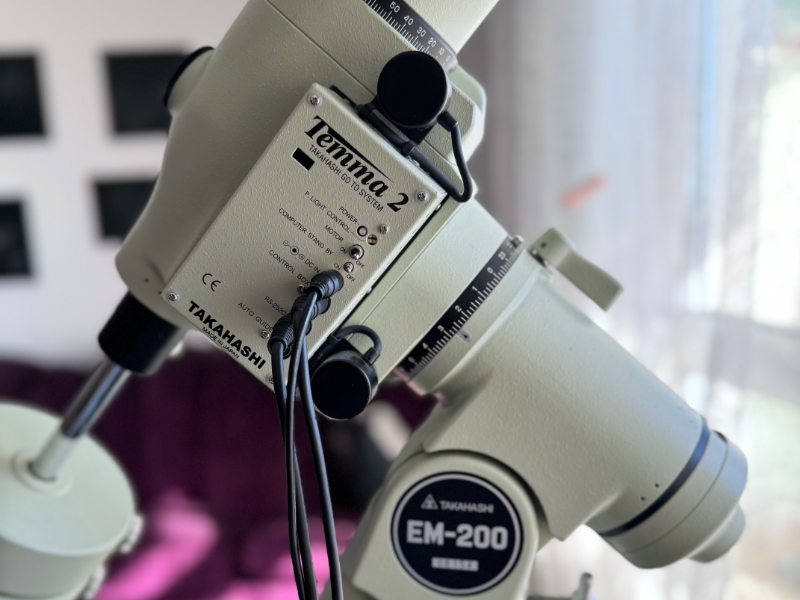
A construção modular permite ao fabricante actualizar alguns componentes sem que tenham que redesenhar o sistema todo. No caso do sistema Temma, este passou por várias gerações sem aparentemente ter obrigado a substituir a parte mecânica da montagem (EM-200), que se manteve praticamente a mesma até hoje (2024). Estas montagens são a definição de "old school". O "kit" Temma2 em particular, era possível comprar e instalar em montagens EM-10 e EM-200, substituindo o sistema USD (sem GO-TO). Obsolescência (daquela "programada") não parece felizmente ter entrado ainda no vocabulário do fabricante.
Comparando com o modelo atualmente disponível, a EM-200 Temma3 que foi introduzida em 2020, a especificação aparenta diferir no PPS (pulses per second) - precisão de cálculo de micro-passos em seguimento, que passou de 100PPS para 196PPS, e na carga máxima de 16kg para 17kg... nada que já muitos utilizadores desta montagem não fizessem já... e continua a não ter PEC ("Periodic Error Correction") que poderia eventualmente ajudar na astrofotografia não guiada.
O único acessório essencial é um tripé, ou pier com a base adequada, que no meu caso é o modelo de metal (TMT30020 SE), pesando 7 kg e com uma altura de 70-111 cm fechado, e 64-101 cm montado, sendo razoavelmente transportável e que se mostrou adequado para a carga que lhe coloco, mas no entanto, não é o suficientemente alto para fazer o alinhamento polar de uma maneira confortável.
Para transporte, uso uma mala pelican 1610 para a montagem e uma pelican 1500? para os contrapesos e anéis para o Takahashi CN-212.
Uma das características que me agrada nesta montagem é a sua versatilidade na utilização, podendo ser minimalista ou se for esse o desejo, muito sofisticada. Pode ser usada sem ter alimentação, bastando soltar os eixos e apontar usando o buscador ou os círculos graduados. Obviamente com alimentação (12V mínimo 3A), pode fazer o seguimento sideral para uma observação mais confortável e usar o comando manual para pequenos ajustamentos. O GO-TO não é de modo nenhum obrigatório, mas torna-se útil especialmente em céus pouco escuros e para astrofotografia.
Infelizmente, a função GO-TO necessita de um computador, coisa que preferiria dispensar sob um céu escuro. A Takahashi chegou a oferecer um comando de mão, o Temma Hand Controller (THC) , que apesar de básico e para não dizer até rústico, parecia feito para se usar ao relento. Mas por muito que o fabricante seja relutante em alterar as suas (excelentes especificações), não quer dizer que a montagem não seja adequada e adaptável às novas tecnologias da moda - é possível usar telemóveis e "tablets" - com fio existe SkyWire apenas para dispositivos IOS, e sem fios SkyFi que são suportados pelo o SkySafari e outras aplicações, mas aparentemente não se conseguem adquirir neste momento. E também, todas as principais infra-estruturas de software de aquisição de imagem, ASCOM , e INDI suportam o protocolo Temma/Temma2.
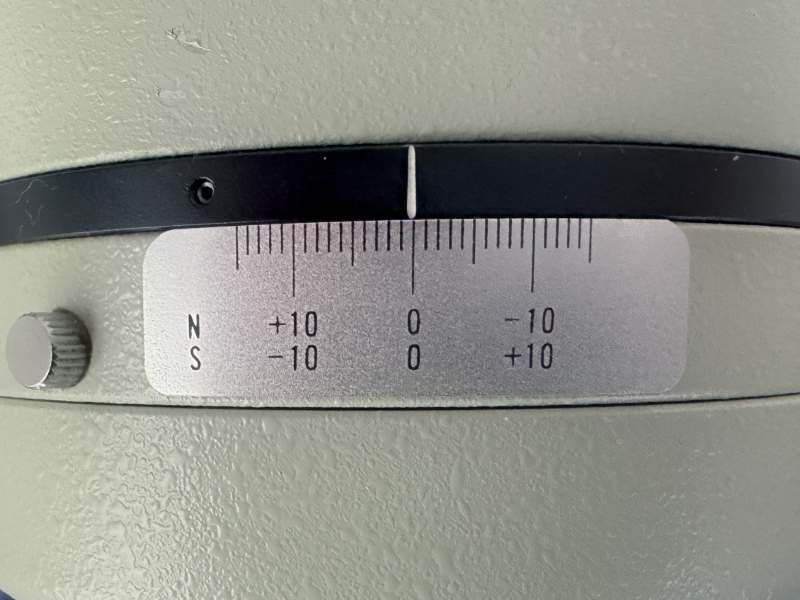
O buscador polar é uma engenhosa calculadora mecânica circular. Basta saber a hora local e respectivo fuso horário, a longitude (para calcular um offset), e rodar até alinhar hora com o dia, fazendo os ajustes em altitude e azimute para colocar a estrela polar num pequeno retículo. O fabricante reclama ter uma precisão de 2 minutos de arco.
No caso das montagens vendidas na Europa, a escala do offset está marcado +15 0 -15, permitindo marcar 15 graus para cada lado do meridiano de Greenwich (GMT longitude 0º), sendo esta a longitude média que permite fazer cálculo para toda Europa ocidental. A longitude média a adoptar deverá ser um múltiplo de 15. que subtraído à longitude do local dê um valor não superior a +15 nem inferior a -15 (os limites da escala que está na montagem). O fuso horário oficial pode fornecer uma pista para o valor valor inicial -> fuso horário*15°. Os 15° é o que Terra roda numa hora.
A fórmula é a seguinte: Offset = longitude do local - longitude média
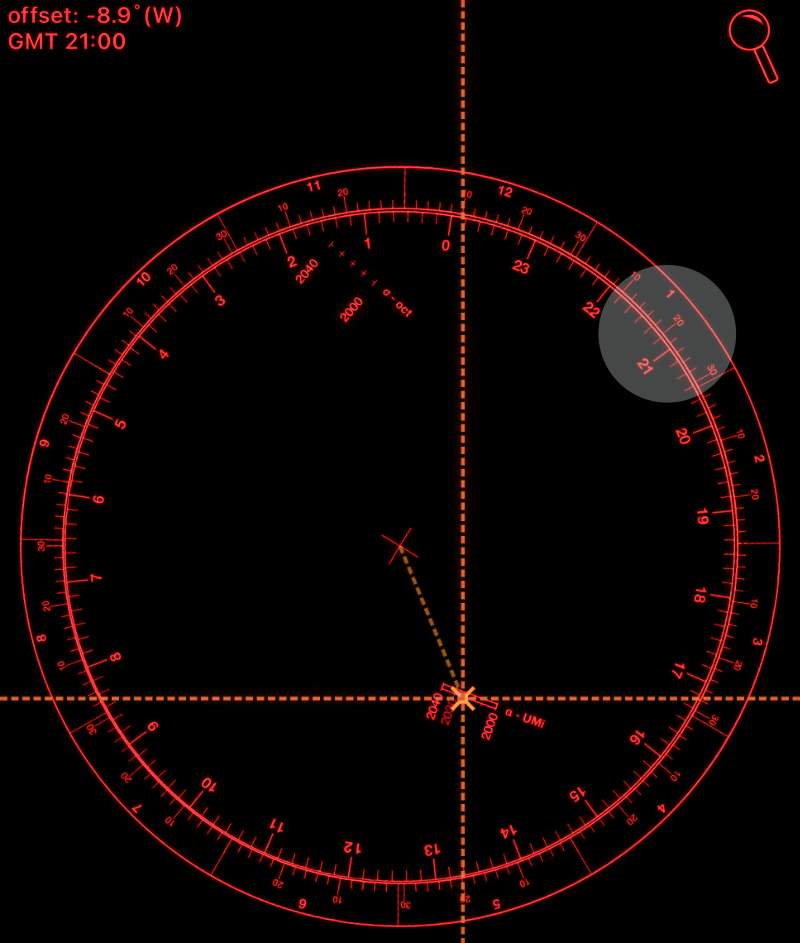 No caso de Portugal continental, o fuso horário é o de Greenwich (GMT) que corresponde a 0º de longitude, e sendo longitude daqui do pátio em Leiria -8.9º (8.9W) por que está a Oeste do meridiano de Greenwich, logo offset = -8.9º-0º = -8.9 - basta colocar o traço perto desse valor na escala N (hemisfério norte).
No caso de Portugal continental, o fuso horário é o de Greenwich (GMT) que corresponde a 0º de longitude, e sendo longitude daqui do pátio em Leiria -8.9º (8.9W) por que está a Oeste do meridiano de Greenwich, logo offset = -8.9º-0º = -8.9 - basta colocar o traço perto desse valor na escala N (hemisfério norte).
A imagem ao lado do Polar Scope Align Pro, é para o dia 23 de Janeiro (mês 1) de 2024, às 21:00 horas locais que correspondem 21:00 GMT, porque fuso horário de Portugal Continental é GMT e não está em vigor a hora de Verão. Clicar para maior resolução.
Para os Açores, a longitude média é -30º (-2x15°) pois para as duas longitudes de exemplo é o valor que permite calcular offset de valor entre -15 e 15, isto apesar do fuso horário ser -1 hora que a do continente (GMT-1), só para ficar mais próxima do continente (decisão política). Ponta Delgada tem a longitude de -25.6 logo o offset = -25.6º-(-30º) = +4.4, positivo porque está a Este da longitude média. A ilha das Flores tem a longitude de -32.0º, resultando num offset = -32.0º-(-30º) = -2.0, porque situa-se a Oeste da longitude médio. No caso dos Açores deve-se usar subtrair 1 hora à hora local! (ponto 3).
Para a Madeira a longitude média é -15º (-1x15°). Funchal tem a longitude de -16,6 logo o offset = -16.9º-(-15º) + = -1.9, porque situa-se a Oeste do longitude médio. Na realidade à semelhança dos Açores, é necessário subtrair 1 hora à hora local, pois deveria a hora local deveria ser GMT-1 e não GMT como no continente.
Um exemplo remoto com longitude positiva: Dili em Timor Leste tem a longitude de +125.6º, a longitude média será +120º (8x +15º) logo o Offset = +125.6 - (+120º) = +5.6, mas deve ser feito na escala S pois está no hemisfério Sul! e a estrela a colocar é a Sigma Octans.
Os manuais da Takahashi são um pouco confusos, porque adotaram valores positivos para longitudes a oeste de Greenwich, mas o que mapas imprimem e o GPS mostram são negativos, que de resto, é a convenção para longitudes a Oeste do meridiano de Greenwich. Na realidade a fórmula está certa, os valores do exemplo dado ("Houston") é que deveriam ser negativos, tanto a longitude do local como a longitude média. Talvez a razão fosse para simplificar a aritmética ? -(-1) = +1 ? ou será que se perdeu qualquer coisa na tradução ?
Se se achar isto tudo muito confuso, pode-se sempre usar esta excelente aplicação, Polar Scope Align Pro deste autor que merece ser compensado. Esta aplicação calcula o offset e a zona horária mais adequada para o local e com o bónus que também tem em conta a refração. Atenção: é sempre necessário marcar o offset na montagem, e nivelar, só depois se ajusta para a hora calculada.
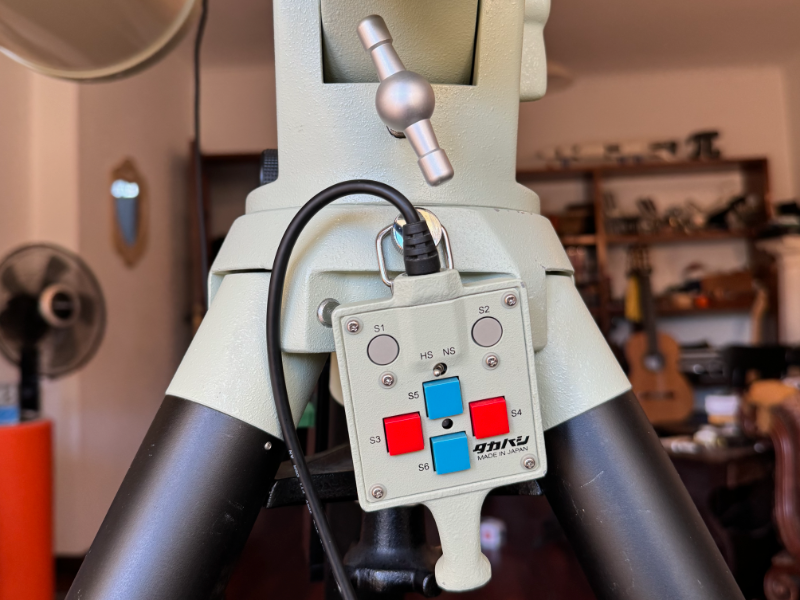
 Este comando manual, tem um design inconfundivelmente nipónico, é um sólido bloco de alumínio que pode ser usado como arma de defesa pessoal. Deram siglas aos botões, que nem por isso deixam de ser crípticos. É possível usar com luvas, e em certas noites é mesmo necessário, porque o comando pode estar extremamente frio. O cabo é felizmente amovível, ou por outras palavras substituível. É um cabo com duas fichas mini DIN 8 macho com todos os 8 diretos (sem trocas) e "terra" ligado (anel exterior). Curiosamente, o cabo série "vintage" para ligar impressoras aos Apple Macintosh serve perfeitamente (fabricante).
Este comando manual, tem um design inconfundivelmente nipónico, é um sólido bloco de alumínio que pode ser usado como arma de defesa pessoal. Deram siglas aos botões, que nem por isso deixam de ser crípticos. É possível usar com luvas, e em certas noites é mesmo necessário, porque o comando pode estar extremamente frio. O cabo é felizmente amovível, ou por outras palavras substituível. É um cabo com duas fichas mini DIN 8 macho com todos os 8 diretos (sem trocas) e "terra" ligado (anel exterior). Curiosamente, o cabo série "vintage" para ligar impressoras aos Apple Macintosh serve perfeitamente (fabricante).
As operações possíveis através deste comando podem ser resumidas no quadro abaixo:
| | Modo | | S1 | | S2 | | S3 | | S4 | | S5 | | S6 | |
|---|---|---|---|---|---|---|---|
| Solar | HS | _ | X | ||||
| Sideral | HS | _ | X | ||||
| Centrar (sem sinc.) | HS/NS | _ | X | X | X | X | |
| Correção RA | NS | _ | + | - | |||
| Correção Dec | NS | _ | + | - |
Quando a montagem é ligada, o modo de seguimento é o sideral, 15.041" por segundo. É possível alterar para seguimento solar (15.0" por segundo). Para seguimento lunar ou de cometas, é necessário fazer cálculos (complexos) aquando o momento de observação, sendo para tal necessário um computador/software que corrija a velocidade de seguimento, tanto em RA como em Dec, como por exemplo pode ser feito pelo TheSky.
Seguimento Hemisfério SulQuando se liga a montagem, o motor roda de Oeste para Este como acontece com as estrelas no hemisfério norte. Para mudar para operação no hemisfério Sul fazer o seguinte:
|
Centrar objecto sem atualizar coordenadas (TT2000 ou outro software)
|
Mudar a velocidade de seguimento para Solar :
|
Mudar a velocidade de seguimento para Sideral (desligar e ligar a montagem é mais rápido):
|
Quando se está a corrigir o seguimento, quer manualmente ou por câmara guia, pode ser necessário ajustar a velocidade do deslocamento quando se carrega os botões de S3 a S6, conforme a distância focal que se está a fotografar ou a observar. As velocidades dos botões de correção ao ligar a montagem no modo "Normal Speed" (NS) são as seguintes:
| | 1 | | 2 | | 3 | | 4 | | 5 | | 6 | | 7 | | 8 | | P | |
|---|---|---|---|---|---|---|---|---|---|
| RA Incrementar | 1.1 | 1.2 | 1.3 | 1.4 | 1.5 | 1.6 | 1.7 | 1.8 | 1.9 |
| RA Decrementar | 0.9 | 0.8 | 0.7 | 0.6 | 0.5 | 0.4 | 0.3 | 0.2 | 0.1 |
| Dec | 1.5 | 3.0 | 4.5 | 6.0 | 7.5 | 9.0 | 10.5 | 12.0 | 13.5 |
Para todas as operações seguintes:
Aumentar velocidade de correção em RA
|
Diminuir velocidade de correção em RA
|
Aumentar velocidade de correção em Dec
|
Diminuir velocidade de correção em Dec
|
Este foi, desde 2002, o sistema GO-TO da Takahashi que foi usado durante muitos anos nas suas montagens. A eletrónica, à semelhança de tudo resto, é conservadora e simples de usar, mas funciona, e por esta altura este sistema já foi (a)provado pelo o tempo. O design industrial e função é para mim quase perfeito, tanto para usar no campo como num observatório fixo, mas não para utilização remota ou sem vigilância (local), pois não é possível desligar os motores por software (apenas pará-los), para por exemplo, parquear (parking). Também não tem limites físicos, para parar o seguimento antes de bater no tripé ou pier. A cablagem é toda exterior e as fichas ficam salientes, mesmo a pedir para enrolamentos e/ou quebra de fichas. Contudo, com os devidos cuidados, parece poder durar uma vida. Ver link para a página do fabricante.
A Temma2 (350x a 12V) passou por duas revisões, a Temma2M (700x sideral a 12V), e a Temma2Z (com ficha standard RJ-12 no AUTO-GUIDE). Entretanto, foi lançado a Temma3 (800x sideral a 12V que, adicionalmente à porta RS-232, permite o controlo por Wifi e por USB, juntado também a alimentação numa caixa externa saindo apenas um cabo unificado (proprietário e caro, aposto...) para ligar à montagem, e tem limites físicos para o seguimento, parando se montagem estiver inclinada menos de 10 graus da horizontal... finalmente.
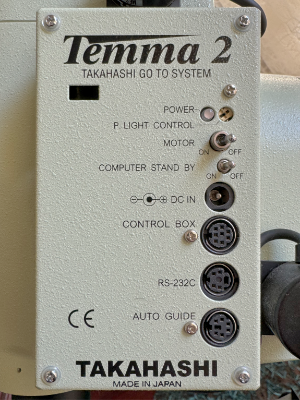
É nesta caixa que se liga todos os cabos, e botões para ligar/desligar motores. Usa fichas mini-DIN de 4 e 6 pinos para a conexão dos cabos da caixa de controlo, do autoguider e porta série RS-232. Foi na minha opinião uma ideia um pouco infeliz (apesar de poupar espaço), pois este tipo de ficha tem pinos algo frágeis, podendo ser muito fácil entortá-los, especialmente no escuro.
Este potenciómetro controla a intensidade do LED vermelho do buscador polar, o que pode ser necessário consoante a condições do céu. Apenas se consegue aceder com uma chave de fendas (3-4mm).
Ligar e desligar o motor RA. Se estiver desligado e com o Stand By ligado, o TT2000 vai "rodando" de modo a posicionar-se no que o telescópio (parado) está a apontar, pois o céu não pára... ou por outras palavras, o TT2000 mostra o que está a passar á frente do telescópio.
Se estiver ligado, memoriza (e envia pela porta série) as coordenadas da posição corrente quando se desliga os motores, para por exemplo, ir beber uma bica descansado. Quando se alinha a montagem com método zenital "SyncZ" (ver mais abaixo), é conveniente o motor estar parado. Com o "Stand By" ligado é possível sincronizar com o software, e SÓ DEPOIS se liga o motor e faz-se um primeiro apontamento para uma estrela a ESTE.
Ficha standard (e comum para variar) de 5.5 / 2.1mm com o centro positivo. A alimentação pode ser feita com um transformador de 12V/24V com pelo menos 3 amperes, ou diretamente de uma bateria de 12V, ou opcionalmente ligando duas em série para 24V. Uma bateria de UPS (7Ah) chega para uma noite bem passada. A velocidade de 350x é para mim suficiente, garantidamente mais rápido do que eu apontar o telescópio manualmente.
Neste conector liga-se o comando manual (CONTROL BOX). Este conector é uma mini DIN de 8 pinos.
Aqui conecta-se o cabo série proprietário para ligar a um computador. Este cabo usa uma mini-DIN de 4 pinos (macho), e uma ficha RS-232 (fêmea). Já quase não existem computadores com porta série RS-232 física, mas não faltam adaptadores para USB. Aconselho vivamente que seja um com o chipset FTDI 232x - para o Windows e MacOS. A porta série tem os seguintes parâmetros Baud: 19200, 8 bits, paridade: even, stopbits: 1, controlo de fluxo: hardware (RTS).
Aqui liga-se (outro) cabo proprietário, para comandos de correção RA/Dec provenientes de uma câmara guia, que, apesar de implementar electricamente todos pinos da ST-4, a ficha onde termina é uma mini-DIN de 6 pinos. Nos tempos que correm, usa-se o "PulseGuide" através da ligação RS-232 para o mesmo efeito (e menos um cabo). Estes cabos são muitos caros, se comprados feitos. O meu fiz, com um cabo de um teclado com ficha PS2 (com os seis fios ligados), no qual cravei uma ficha RJ-12 na outra ponta.
As Temma não guardam nada em memória quando são desligadas, e cada vez que se liga a montagem os parâmetros de inicialização são sempre os seguintes:
Após este procedimento, a montagem e o software estão em sintonia. Se se mover o telescópio com o comando manual, o software é atualiza a posição, e se no software fizer algum comando para mover será enviada para a montagem. Curiosamente, no protocolo Temma, a hora sideral local tem sempre que ser enviada antes e depois de comandos de movimento (talvez por não manter um relógio interno).
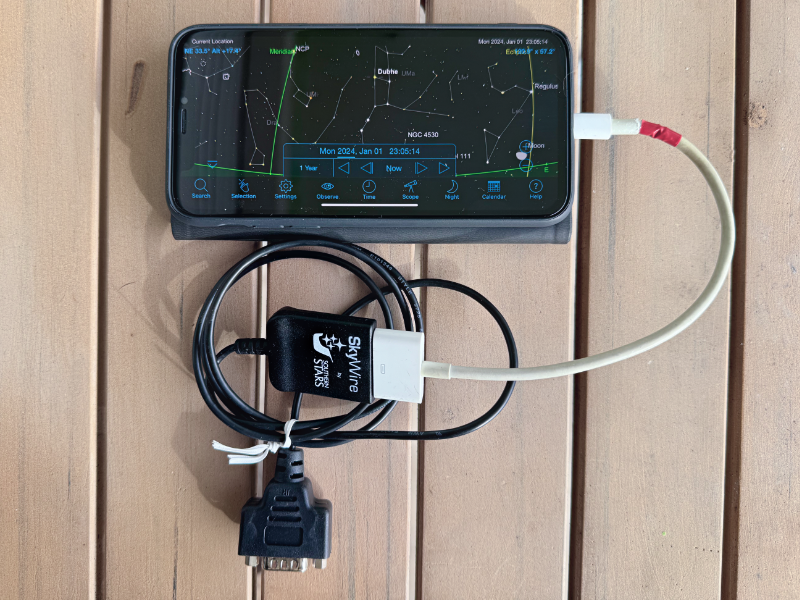
Com SkySafari 5, 6 ou 7, basta colocar o telescópio a apontar para uma estrela no horizonte Este, porque é o que a Temma em principio está à espera na primeira sincronização, e executar o comando "sync". Este método deixa-me sempre um pouco receoso que não "perceba" como a montagem e o tubo do telescópio estão posicionados, e poder rodar da pior maneira para o próximo objecto, mas no entanto tem se portado muito bem... Neste momento, o "Skywire" é apenas suportado na versão 5 e 6, na versão 7 o fabricante parece ter retirado o suporte, que apesar de terem anunciado nas últimas atualizações, ainda não conseguiram repô-lo. Este cabo é apenas para dispositivos Apple IOS. Espero que entretanto consigam porque prefiro usar um cabo, para mim mais simples e fiável do que ter usar Wifi (usando o SkyFi) o que significaria ter mais baterias para tomar conta.
Uso um Iphone X descomissionado com uma capa integral para o proteger da humidade e temperatura. Tme uma autonomia de várias horas (50 mA em uso, 5 mA em standby), e que na realidade funciona muito bem. Pode-se desligar e ligar o cabo "Skywire" sem problema, sincronizando sempre com o que telescópio está a apontar no momento. Um pormenor importante deste telefone é que tem um ecrã OLED, não sendo retroiluminado: a cor negra é mesmo negra (LED desligado).
O driver ASCOM para as Takahashi Temma, tem vários outros procedimentos para a inicialização e até parqueamento. Este driver pode ser usado por praticamente todo o software relacionado com aquisição de imagens astronómicas.
Esta infraestrutura suporta razoavelmente a Temma2, mas é necessário um computador para instalar o servidor que centraliza todos os dispositivos. Uma das vantagens do INDI é que pode ser instalado num RaspberryPI, um pequeno computador ARM que pode ser atarraxado à montagem, para controlar usando por exemplo, o SkySafari 7 (por Wifi), e com alguns "MODS", até com a porta série do "PI".
A performance do GO-TO não é de modo nenhum brilhante, mas se ajudarmos com um bom alinhamento polar e com apontamentos intercalares a estrelas brilhantes mais perto do alvo, é suficientemente precisa para o colocar num campo com menos de um grau. É possível ter apontamentos de grande precisão usando por exemplo, o TPoint da Bisque (TheSkyX) , ou o Maxpoint da Diffraction Limited, mas pagam-se bem.
O protocolo Temma é muito pequeno e simples, os comandos e consultas são enviados por um cabo série standard e interpretados e respondidos pela a montagem. Este o PDF que encontrei já nem me lembro onde, que descreve o protocolo e fornece exemplos.
É fácil perceber que o "hardware" Temma2 não tem praticamente nenhuma capacidade computacional, para além das "contas" necessárias para mover os motores, no caso de apontamentos, e mudar a velocidade de seguimento RA/Dec para o caso dos cometas/lua.
A inicialização é feita enviando a hora sideral local, calculada pelo o software do computador, e também a latitude do local.
Depois de inicializado, será feito um "sync" com as coordenadas equatoriais do zénite. De seguida é só fazer apontamentos e refinando com "syncs", talvez porque os codificadores (encoders) terem uma resolução RA/Dec de 9" e 6" respectivamente, apontamentos muito distanciados podem acumular algum erro, daí, fazer etapas em estrelas e sincronizar (na realidade "limpando" o erro acumulado) possa ser uma boa ideia, especialmente para centrar objectos muito ténues. Internamente parece ser necessário enviar sempre a hora sideral local antes e depois de movimentar, de onde se pode inferir que nem esse valor é internamente atualizado.
De resto, tem comandos para ajustar as velocidades de correção, o seguimento solar ou sideral, um comando para emular o controla manual, um enigmático comando para a voltagem e ainda um não documentado comando de AUTOGUIDE. O ligar e desligar o "Stand By", ou seja os motores, apenas é suportado pela Temma2.
|

|
|
|
|

|

|

|
|
Luís Carreira, Janeiro de 2024