|
N'ayez
pas peur des caméras CCD

|
Image
LRGB+Hα de M33 enregistrée par Jason Ware
avec un Meade ACF 12 de 400 mm d'ouverture équipé d'une CCD Apogee U9 6303E.
Temps d'intégration total de 520 minutes. |
Le
temps d'intégration (IV)
Le
temps d'intégration intervient surtout dans la photographie du ciel profond
car en photographie planétaire, mis à part Pluton, les astéroïdes et les
comètes, tous les astres supportent une prise de vue instantanée.
Le
temps d'intégration typique pour enregistrer une nébuleuse ou une galaxie avec une caméra CCD
est compris entre 1 et 5 minutes si on utilise la caméra en binning mode 1x1 ou
mieux, 2x2 (fusionnant deux pixels ce qui réduit la résolution de 50% mais
augmente la sensibilité du capteur CCD). De cette façon en utilisant un télescope de 100
mm à f/6.3 on peut atteindre la magnitude 18 en seulement 5 minutes
d'intégration et la magnitude 20 en utilisant un télescope de 350 mm à f/6.3 !
Dans
des conditions extrêmes, le temps d'intégration peut durer 30 minutes au
foyer d'un télescope de 400 mm pour enregistrer les objets les plus
pâles (ou des spectres faibles) et 18 fois plus longtemps si vous
désirez réaliser des composites tricolores.
Pourquoi 18 fois ? Parce
qu'en utilisant un filtre coloré la lumière incidente passant à travers le
filtre est moins intense et la caméra CCD requiert 6 fois plus de temps
pour obtenir le même résultat que sans filtre. Ensuite vous devez
prendre 3 images, en lumière bleu, verte et rouge (certains ajoute une
quatrième image pour le contraste qui est une image N/B).
Ajoutez à cela
les défauts d'offset, des décalages qui peuvent se produire avec les objets dont les
détails évoluent rapidement (Jupiter, etc.). C'est pourquoi la CCD couleur est
un autre défi réservé à l'amateur averti. Elle reste néanmoins la
meilleure solution pour enregistrer les couleurs du ciel mais elle demande
du temps et représente un certain prix.
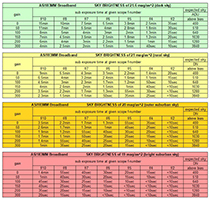
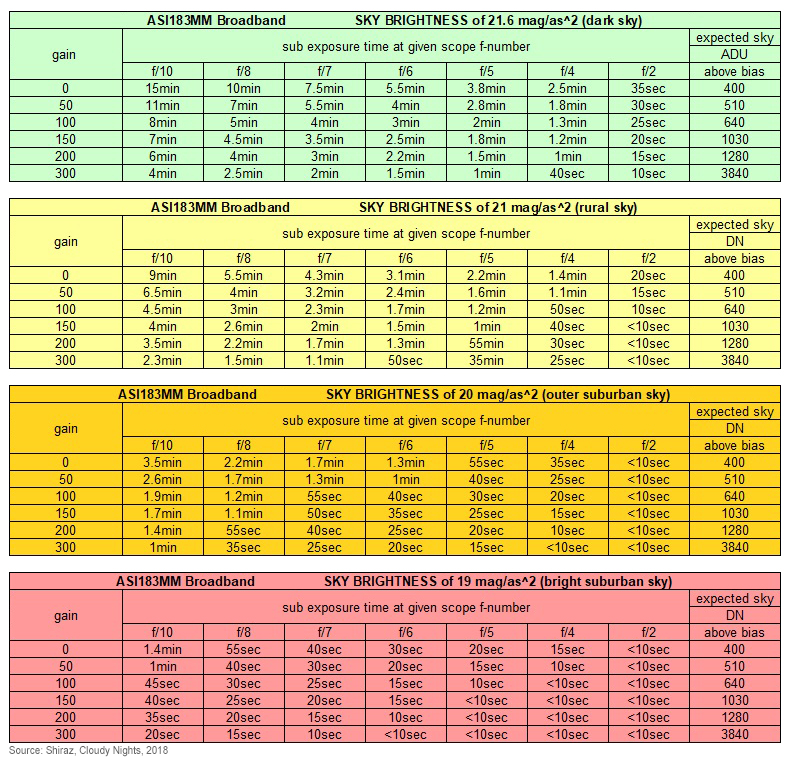
Vous
trouverez ci-dessous deux tables de temps d'intégration dédiées aux
caméras CCD N/B, à gauche pour l'ancienne mais classique caméra CCD
KAF-0400 de Kodak, à droite pour l'ASI183MM de ZWO en mode large bande
passante (créé par Shiraz).
|
Caractéristiques
d'un chip KAF-0400
sur un télescope C8 f/6.3
|
Table
de temps d'intégration ASI183MM
|
|
Rapport
S/B |
Exposition
N/B |
Exposition
sous filtres R,G,B
(binning
2x2) |
Niveau
de bruit après compositage
de
30 images
exposées
1 minutes
|
 |
|
Rouge
(585-680) |
Vert
(496-585) |
Bleu
(<380-502) |
|
9 |
1
min |
2.2
min |
2.2
min |
10
min |
1.00 |
|
28 |
5 min |
12 min |
12 min |
80 min |
1.12 |
|
50 |
20
min |
41
min |
41
min |
5.5
hrs |
- |
|
Une
autre solution consiste à utiliser une caméra CCD couleur "one
shot" comme par exemple l'Astrovid
Starlight Xpress MX5c vendue 1300$ ou l'une de ses nombresues
concurrentes. La caméra CDD MX5c dispose d'une matrice de
filtres (grille de Bayer) placés au dessus des pixels, composée de "couleurs
secondaires" appliquées dans une grille Jaune, Magenta et Cyan
(comme la technique photo CMYK ordinaire). Les filtres sont disposés de
telle sorte que la composante de Luminance (contraste) de l'image puisse
être extraite avec une grande définition. En théorie la perte de
lumière est seulement de 33%. L'image couleur résultante est
satisfaisante mais au prix d'une réduction de la résolution et d'une
prolongation du temps d'intégration.
La caméra MX5c est refroidie, mais pas régulée. Cela signifie que vous
devez réaliser une image noire (dark frame) à température ambiante
chaque fois que vous l'utilisez pour la retirer ensuite des images du
sujet et réduire ainsi le bruit électronique. Bien sûr on peut
également obtenir cette image noire par traitement d'image.
Jusqu'au
début des années 2000, Astrovid avait peu de concurrents parmi lesquels HiSis,
Meade et SBIG. Ces systèmes ne disposaient pas de fonctions automatiques.
Depuis cette époque, la technologie a fortement progressé. Non seulement les
capteurs sont devenus plus efficaces et plus grands mais les systèmes CCD se
sont dotés de fonctions automatiques : mise au point automatique,
auto-exposition optimisée, auto-stretch pour faire ressortir les objets
faibles, soustraction automatique des images noires, alignement automatique et sommation
des images, système de refroidissement, etc.
Une poignée de constructeurs proposent même des caméras
couleurs à faible facteur de forme comme par exemple l'Atik 460EX,
QHY12 ou de très petits modèles comme la SBIG
ST-i Planet Cam and Autoguider, toutes très bien adaptées aux petites
installations et à l'imagerie planétaire.
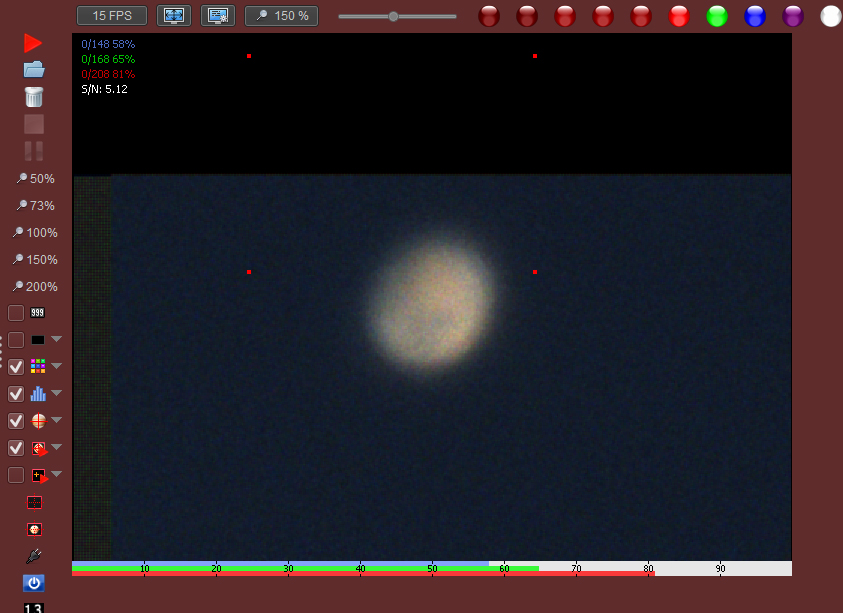
La
résolution globale des premières caméras CCD couleurs était inférieure à
celle d'une caméra CCD monochrome en raison des contraintes imposées par le
système de couleurs (grille de Bayer). Malgré cette limitation physique les
résultats n'étaient pas mauvais du tout mais avec le temps et
de nouveaux chips, ces petites caméras CCD couleur ont beaucoup évolué et
donnent de très bons résultats, spécialement en imagerie planétaire comme
le confirme l'excellente image de Mars présentée ci-dessus.
Toutefois,
pour le ciel profond, si vous désirez vraiment
réaliser des documents de qualité vous devrez opter pour une caméra CCD
monochrome et acquérir une roue à filtres colorés et des filtres de qualité
(par ex. ceux d'Optec). Grâce à cette
combinaison vous pourrez ajuster les temps d'intégration de chaque lumière
(L, R, G, B, Hα, etc.) en fonction de la sensibilité de votre chip, effectuer
des mesures astrométriques ou photométriques et même étudier des objets en
lumière monochromatique.
Les
problèmes habituels
Les
performances des caméras CCD vont de paire avec leurs défauts et il est vain
d'espérer obtenir de bonnes images si vous ne maîtrisez pas tous les facteurs
qui entrent dans cette équation. Décrivons donc clairement quels sont les
problèmes que l'on risque de rencontrer en utilisant une caméra CCD et les
moyens de les éviter ou de réduire leurs effets.
Facteur
de forme
Il
s'agit d'un terme technique emprunté à la physique qualifiant le profil d'un
appareil (lié à la quantité de flux atteignant une surface). En utilisant un
APN au foyer primaire d'un télescope Schmidt-Cassegrain, avec sa longueur de 12
à 14 cm, on constate immédiatement que sa position juste devant la lame de
fermeture crée une importante obstruction, surtout dans les télescopes de
moins de 300 mm d'ouverture.
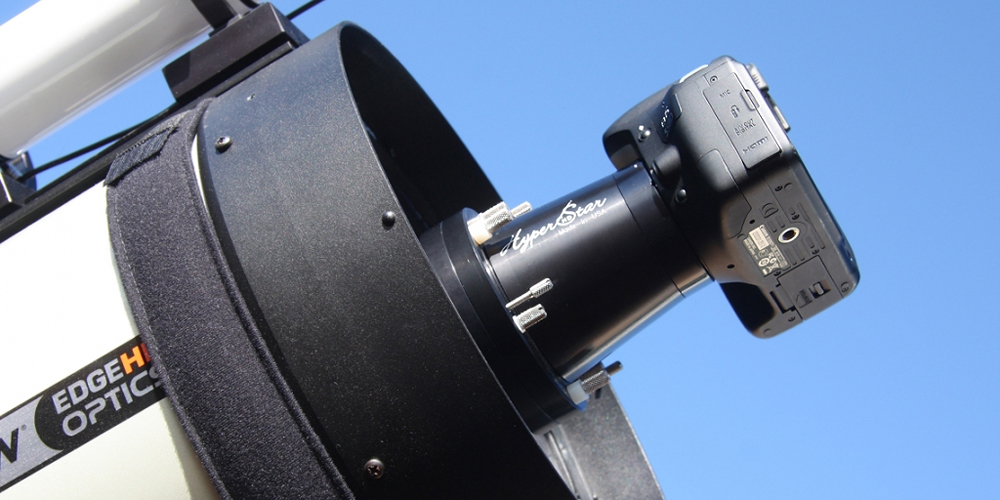
Comme
on le voit dans le schéma ci-dessous à gauche, un APN Canon EOS 60D fixé au foyer
primaire d'un C8 affecte sérieusement le disque d'Airy d'un étoile et on perd
jusqu'à 25% des détails de l'image comparé à un système sans APN.
A
lire : What are Fastar and HyperStar? How do they
work?, Celestron
Pour
résoudre ce problème, l'amateur doit acheter un APN reflex à faible facteur de
forme (par ex. un Olympus) ou une petite caméra CCD cylindrique (Atik 460EX, Nightscape 8300,
etc.) qui se fixe sur le système Hyperstar
de Starizona comme on le voit ci-dessus (ou sur l'ancien système optique Fastar
de Celestron mais abandonné en 2005).
Dans
l'éventualité (rare) où cette solution serait trop précaire ou instable sur
de petites installations légères, l'alternative est d'utiliser une petite
webcam HD. Sinon, il n'y a pas d'autre choix que d'utiliser le foyer
Cassegrain avec un réducteur de focal (mais le poids sera similaire) ou mieux,
d'utiliser un plus grand télescope afin de réduire l'obtruction relative
engendrée par le capteur placé au foyer primaire.
La
mise au point
Les problèmes de mise au point sont accentués en
utilisant une caméra électronique avec un télescope. Etant donné que
le champ du détecteur CCD est très étroit, en particulier en imagerie
planétaire où l'on travaille en projection oculaire (ou avec une Barlow),
une attention particulière doit être apportée à la stabilité des images et
aux changements de température. Typiquement, le décalage au niveau du plan
focal est égal au carré du facteur d'amplification du miroir secondaire,
qui est de 5x pour un télescope Schmidt-Cassegrain à f/10. Aussi si au
cours de la mise au point le miroir primaire ne bouge ne fut-ce
que de 0.001 mm, ce "mirror shift" crée au plan focal un
décalage de 0.025 mm et sera facilement enregistré par la caméra CCD.
Aussi,
avant de prendre les premières photographies CCD des objets célestes, un petit
calcul est donc utile pour vérifier la tolérance de votre caméra CCD en fonction
de votre système optique.
A
consulter : Formulaire pratique
 |
|
Image
RGB de M81 et M82 obtenue par Robert
Gendler avec un télescope Ritchey-Chrétien de 317mm f/9 installé sur une monture
Astro-Physics AP1200 et équipé d'une caméra CCD SBIG. Image corrigée numériquement. |
|
La position du point focal varie également grosso modo comme le carré du
rapport focal. Ainsi, un télescope ouvert à f/6.3 requiert une mise au
point 2.3 fois plus précise qu'au rapport f/10. Au foyer primaire d'un
instrument ouvert à f/6, la profondeur de champ (de la mise au point) est de
seulement 0.0127 mm. C'est pourquoi un système de mise au point électrique est
hautement recommandé (tel que le système NGS-F de JMI
ou le Robofocus pour les télescopes Schmidt-Cassegrain) ainsi qu'un
mécanisme permettant de solidariser toute l'installation optique lorsque
des accessoires relativement lourds sont installés derrière l'oculaire
(système de guidage hors-axe ou système de flip-mirror robuste). Le fait
d'insister lourdement sur la qualité et la robustesse des montures et des
adaptateurs photographiques fixés aux télescopes n'est donc pas une
idée à considérer avec légèreté... Nous y reviendrons.
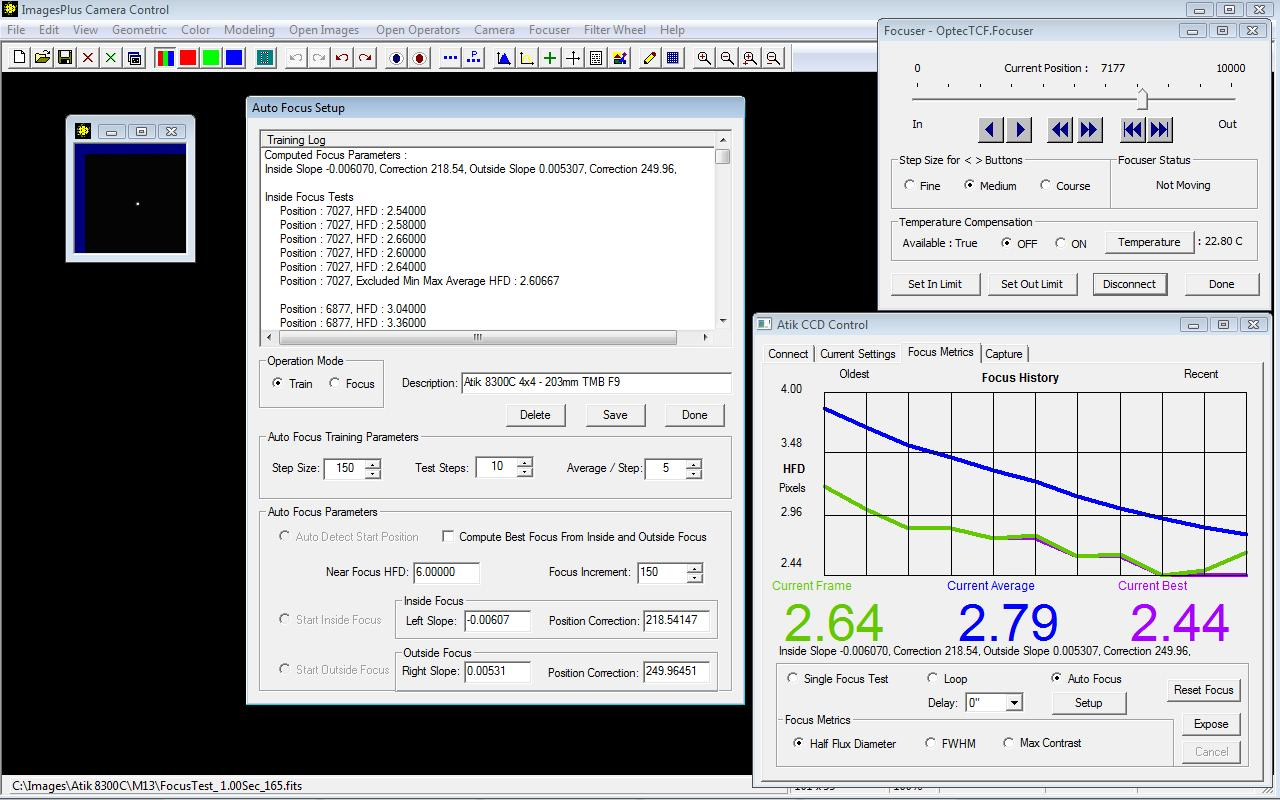
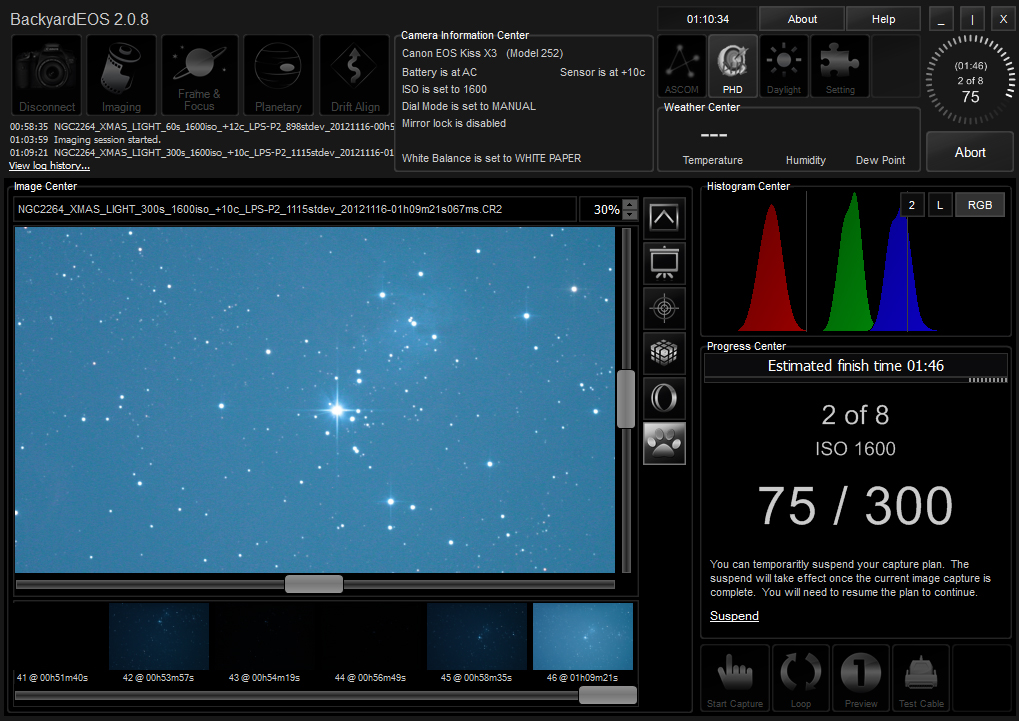
Le
logiciel fourni avec la plupart des caméras CCD comprend un menu pour
la mise au point qui prend en charge la tâche harassante de trouver le
point focal au niveau du capteur photosensible. La caméra prend une
série de photographies d'une zone présélectionnée en modifiant
légèrement la mise au point. Ces images sont habituellement exposées 1
s pour les objets brillants et 10 s pour les plus pâles. Ensuite, le
système vous demande de choisir l'image la plus nette. Certains modèles
vous offrent aussi la possibilité de prendre immédiatement une image
noire (voir plus loin) avant l'image brute. Lorsque la mise au point est
effectuée, il reste à centrer l'objet, soit en basse résolution pour
augmenter la sensiblité soit en plein cadre (full mode).
Train
optique et tirage
Comme à l'époque de la photographie argentique,
au niveau du plan focal, certains trains optiques peuvent être assez longs et
lourds jusqu'à créer un problème de tirage ou mettre la stabilité des
petites installations en danger. En effet, un train optique complet peut
par exemple comprendre : un système de mise au point électrique + un
réducteur focal + un rotateur de champ + un diviseur optique + une optique
adaptative + une roue à filtres + une caméra CCD. Sa longueur totale est de
20-40 cm selon que les accessoires sont étroits ou larges.
Heureusement, il
existe des solutions pour raccourcir ce train optique comme par exemple
de placer certaines accessoires ailleurs (le système de mise au point
automatique dans le bouton de mise au point des SCT ou dans le Crayford et le
réducteur focal dans le "visual back" des SCT) et en
remplaçant le système de guidage hors axe et la caméra CCD par une CCD
"dual chip" combinant l'auto-guideur et l'imageur et intégrant
une roue à filtres. Il reste finalement un adaptateur, le rotateur de
champ, l'optique adaptative et une (plus grande) caméra CCD. Selon les accessoires, on
peut ainsi réduire le tirage entre 5 et 20 cm soit jusqu'à 50% de sa longueur.
A
lire : How to Set the Correct Back Focus for Your Telescope (Guide),
OptCorp, 2021
 |
 |
|
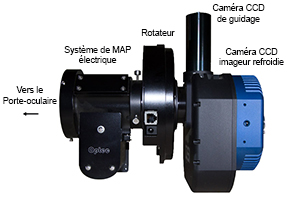
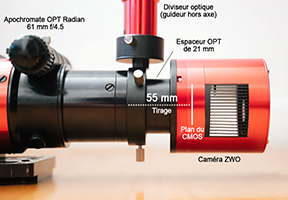
A
gauche, un train optique type (les caméras CCD sont un imageur QSI 683wsg-8
comprenant un port externe dans lequel est inséré une CCD de guidage Lodestar. A
droite, l'utilisation d'accessoires au niveau oculaire impose l'insertion
d'un espaceur pour atteindre le point focal au niveau du photocapteur.
Documents constructeur et OPTCorp
adaptés par l'auteur. |
|
Le
bruit thermique
Dans
une caméra CCD idéale chaque pixel devrait afficher un niveau de gris valant 0
en l'absence de lumière et une valeur augmentant linéairement à mesure que
l'intensité lumineuse croît, jusqu'à ce qu'il soit saturé. De plus, la réponse de
chaque pixel devrait être identique. Les caméras CCD actuelles sont loin
d'atteindre cet objectif idéal.
La
principale raison est le fait que les électrons émis par un pixel
dépendent du nombre de photons incidents qui le frappent additionné du
nombre d'électrons générés par le "bruit thermique". En utilisant
des composants électroniques, faute d'atteindre un rendement idéal (100% de
l'énergie reçue devrait être convertie sans perte), ils dissipent tous un peu
chaleur qui génère un bruit thermique qui diminue de moitié
chaque fois que la température baisse de 6 ou 7°C.
 |
 |

|
|
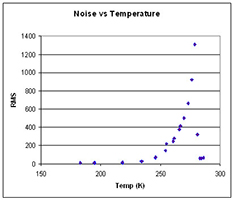
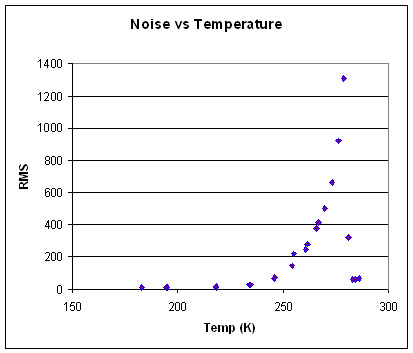
A
gauche, l'augmentation du bruit thermique d'un capteur CCD en
fonction de la température. Au centre une caméra CCD Meade
DSI équipée d'un grand angle de 8 mm couverte de glace
mais fonctionnant encore par -70°C à la base de Concordia en
Antarctique. Document G.Dargaud.
A droite, caméra CCD 1300S de Spectral Instruments
(100 kpixels de 9 µm) refroidie jusque -100°C. |
|
Cette
baisse du courant d'obscurité total avec le froid a bien sûr des limites; la
plupart des CCD ne fonctionnent plus très bien en-dessous de -120°C. Comme
le montre le graphique ci-dessus, en pratique le bruit thermique est quasiment
supprimé aux alentours de -100°C où l'image présente un très léger bruit
aléatoire. Ce refroidissement peut-être obtenu en isolant thermiquement le
photocapteur de son environnement.
Comme les
photoamplificateurs, le photocapteur CCD est donc très sensible au rayonnement
infrarouge et aux changements de température. Les sources
infrarouges extérieures peuvent potentiellement être vues par le
détecteur alors qu'elles sont invisibles à nos yeux. C'est pour cette
raison qu'il faut retirer de l'environnement immédiat du détecteur tous
les accessoires brillants émettant un rayonnement infrarouge ou qui ne
sont pas anodisés en noir (ou peints en noir mat). Parmi ces objets
citons le coulant du porte-oculaire, les horloges digitales, les cercles de
graduation, les résistances électriques et autres télécommandes...
Dans
le cas d'une caméra CCD non refroidie, pour ne pas accentuer le bruit
thermique il convient de mettre la caméra en température et d'attendre
environ une demi-heure après l'avoir branchée avant d'effectuer les premières
prises de vue. Cette dégradation est provoquée par des erreurs statistiques dans la lecture
des électrons par les pixels (photosites). L'erreur d'échantillonnage décroît
inversement avec la racine carrée du niveau de brillance des pixels (le
facteur DN).
Ce greffe sur ce problème le fait que les pixels constituant
un détecteur CCD n'ont pas tous la même sensibilité à la lumière. La
variation entre photosites d'un pixel peut osciller entre 1 et 2%.
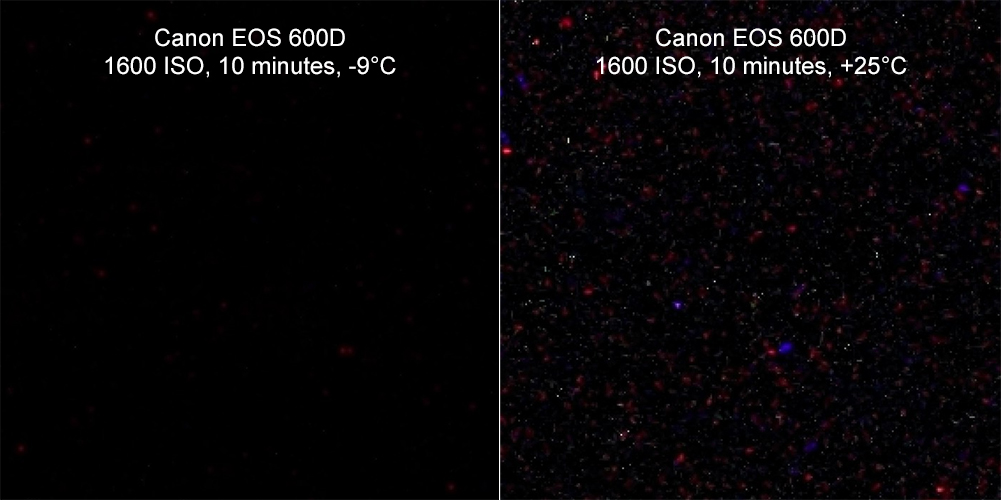
Quelle
que soit la caméra utilisée, le capteur CCD ou CMOS n'étant généralement
pas refroidi, le bruit thermique (électronique) est plus apparent dans les zones
sous-exposées ou faiblement éclairées et plus encore en été où
la température ambiante accentue le bruit thermique comme on le voit
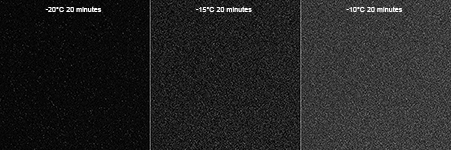
ci-dessous.
 |
 |
|
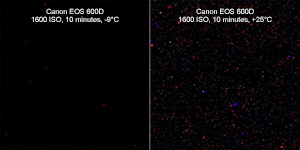
Effet
du refroidissement sur le bruit électronique d'un capteur CCD et
CMOS. A gauche, images "noires" d'une caméra CCD SBIG STL-11000
respectivement refroidie à -20, -15 et -10°C. A droite, les images "noires"
d'un Canon EOS 600D refroidi à -9°C et à température
ambiante de 25°C. Toutes les points sont en réalité des parasites créés
par le système électronique ! Chaque fois que la température
diminue de 5° ce bruit thermique diminue de moitié. Ces images
en sont la parfaite illustration. |
|
Pour
réduire le bruit thermique des images, la première solution est d'utiliser
une caméra CCD ou CMOS refroidie, les meilleures étant également
thermorégulée avec une stabilité de l'ordre de 0.5°C. Le capteur photosensible
peut-être refroidi avec de l'azote liquide comme le système PixCellent
qui permet de descendre jusque -120°C mais ce procédé est très cher.
L'alternative est le refroidissement
thermoélectrique qui par effet Peltier permet aux caméras CCD et
quelques rares APN haut de gamme (par exemple les Canon EOS 600D, 6D et 5D
équipés d'un capteur CMOS) de descendre jusque -35 à -40°C selon les
modèles par rapport à la température ambiante et exceptionnellement
jusque -100°C dans le cas des caméras CCD de Spectral
Instruments. Enfin, plus économique, on peut également utiliser un cryorefroidisseur
utilisant une pompe mécanique.
La
résolution et le binning mode
La
photographie du ciel profond au moyen d'une caméra CCD requiert de préférence
des pixels de grandes dimensions parce que les grands pixels collectent
simplement plus de photons que les petits. C'est ce qu'on appelle le binning
mode (de binning, "mettre en boîte") qui permet d'additionner les signaux
enregistrés par plusieurs rangées et de colonnes adjacentes de pixels (binning
1x1, 2x2, 4x4, etc).
|

|
|
Photographie
de M16 résultant du compositage de trois images RGB enregistrées avec trois
instruments Astro-Physics : une lunette de 180 mm f/7 EDF, un télescope
Maksutov-Newton de 235 mm f/4.3 et un Maksutov-Cassegrain de 250 mm f/14.6.
Ces instruments étaient équipés de CCD SBIG ST-8 et ST-10 munies d'une roue
à filtres colorés CFW-8, d'une FLI MaxCam CM10-2E et d'un filtre
H-alpha Custom Scientific. Les images ont été traitées avec CCDSoft,
Mira Pro, Maxim DL/CCD, Sigma Beta et Photoshop. Document publié avec
la courtoisie de Philip Perkins,
Trent Kjell et Roland
Christen. |
Désavantage, en mode binning 2x2 la
résolution chute de moitié, en revanche la sensibilité augmente. A l'inverse,
en imagerie lunaire et planétaire l'amateur recherche la plus haute résolution
et s'intéresse beaucoup moins à la sensibilité. Dans ce cas le binning mode
le plus petit est recherché.
Enfin, si les chips ont tendance à devenir plus
grand aujourd'hui, la "profondeur" des pixels a également une grande importance
sur la qualité des demi-tons de l'image finale. Une profondeur de pixel de 16
bits (65536 niveaux de gris) est préférable à 12 bits (4096 niveaux de gris). Mais
tous ces aspects ont une influence sur la dimension de l'image finale, sur le
temps de téléchargement et de traitement ainsi que sur l'espace disque
nécessaire à sa sauvegarde.
Quant
à la couleur, ce n'est plus avec 12 ou 16 bits que l'on travaille, mais au
moins 24 bits. Dans ce cas la taille des fichiers devient presque ingérable
pour un amateur et les utilisateurs de scanners connaissent bien ce problème.
C'est pour cette raison mais aussi pour une question de qualité d'image que
l'usage veut que l'on travaille plutôt à partir d'images LRGB pour obtenir des
images couleurs plutôt qu'à partir de caméras couleur.
La
précision de l'entraînement
Pour l'astrophotographie du ciel profond,
le dernier élément mécanique pouvant être une source de problèmes
potentiels est la monture motorisée. Comme nous l'avons évoqué, le
fait d'utiliser une caméra CCD, un outil très précis en soi, accentue
les problèmes de stabilité de l'installation et on est vite
contraint d'utiliser une monture robuste pour résoudre ces problèmes.
Gardez bien à l'esprit que votre monture est plus importante que votre optique;
vous obtiendrez plus facilement de bonnes images avec une optique
médiocre sur une excellente monture que l'inverse.
D'un
point de vue photographique, une montre altazimutale aura le problème de la courbure du champ lorsque
vous suivrez des objets à travers le ciel car le guidage ne s'effectue
plus sur un ou deux axes, mais sur trois axes. Le "Field de-rotater"
popularisé avec les télescopes Schmidt-Cassegrain n'est pas une solution
car il insert un nouvel degré de liberté qu'il faudra contrôler. La
monture altazimutale pourra être utilisée en imagerie planétaire tant
que le temps d'exposition reste court (plus rapide que 1/10e de seconde environ).
Pour
photographier les objets du ciel profond, la monture équatoriale est
indispensable (ou l'altazimutale en mode équatorial). Il y a une seule exception :
les télescopes d'au moins 250 mm d'ouverture peuvent travailler en mode
altazimutal mais doivent utiliser un dérotateur pour éviter les traînées
stellaires en bordure de champ. Le poids et l'encombrement de cet
accessoire font qu'il n'est pas recommandé pour les télescopes de
diamètre inférieur.
La
monture doit être correctement mise en station et être pilotée par un
système d'entraînement dont les erreurs de poursuite sont contrôlées avec une
précision de l'ordre du pixel. Toute irrégularité plus importante sur
l'un des axes sera enregistrée sur l'image. C'est pourquoi de nombreux
amateurs se font épauler par des caméras CCD d'auto-guidage. Mais si
la précision d'une bonne monture allemande traditionnelle est de
~1", une monture Direct drive
descend sous la limite de diffraction, raison pour laquelle ce type de monture a
été adopté par de nombreux amateurs. La galerie
d'images est très éloquante à ce sujet.
Lorsque
toutes les questions techniques (et financières) seront résolues (les conseils d'un
vendeur qualifié ou d'amateurs avertis ne seront pas superflues), vous serez enfin prêt à photographier vos
objets célestes favoris. La bonne nouvelle est qu'après avoir vu quelques images
CCD réalisées par des amateurs expérimentés et leurs équivalents professionnels, bien malin
sera celui ou celle qui pourra dire qui est le premier et qui est le second !
Bien sûr, en y regardant de plus près, le plus grand gagne toujours, mais
n'oubliez pas que le traitement d'image peut encore brouiller les
pistes... Comparez par exemple ces photos de M42 photographié par le HST
et par Jason Ware
utilisant un RCX400 de 305 mm f/8 ou par l'Officine
Stellare avec un Riccardi-Honders RH de 200 mm f/3... En une génération,
la technologie mise à disposition des amateurs (talentueux) a fait un bond de géant !
A
présent que nous avons enregistré nos images brutes des objets célestes,
quelques images complémentaires doivent être enregistrées avant de les traiter
sur ordinateur. Cette étape est appelée la calibration ou prétraitement d'image. C'est
l'objet du prochain chapitre.
Prochain chapitre
La
calibration ou prétraitement d'image
|



















{kind=link}
{kind=link}
{kind=link}