- Eléments théoriques
- SHG avec un 115/900
- SHG à refracteur 90/1300 (partie 1)
- SHG à refracteur 90/1300 (partie 2)
- Newton 192/950
- Dobson 80/400 'Babydob'
- Spectre solaire ultra-simple
- Quelques schémas électroniques
- Quelques schémas optiques
- Logiciel Untransversaliumisator
- Logiciel de traitement des videos
- Système de pointage "PUSH TO"
- Radiocommande AD, Dec et map
- Focuser 3D pour Vixen 150/750
- Année :
- Cartes synoptiques :
- Vidéos
- Diagramme de Maunder
- Cycle 23 en images
- Transit 2004 de Vénus
| Un "PUSH TO" sur une monture équatoriale de type Pierre Bourge
| |||||||||||||||||||||
|
Introduction Le pointage d'un Newton sur monture équatoriale n'est pas toujours facile, en particulier sur des objets peu lumineux. La position du chercheur et de l'oculaire peuvent entraîner des contorsions très inconfortables et qu'il faut tenir tant que l'objet n'est pas trouvé. Cela peut prendre beaucoup de temps avant d'amener la cible dans le champ de l'oculaire ou de la caméra. On peut aussi, connaissnt l'écart en Ascension Droite et en Déclinaison d'une planète brillante par rapport au Soleil, essayer de la trouver en plein jour. Je me suis donc penché sur la réalisation d'un système de type "PUSH TO" qui pourrait me simplifier la tâche du pointage d'objets. Le principe est le suivant : On vise une étoile brillante avec le télescope et on mémorise ses coordonnées à partir d'une liste d'étoiles. Ce sont donc les coordonnées de pointage actuelles du télescope. On recherche ensuite les coordonnées de la cible souhaitée dans une liste d'objets. Il ne reste plus qu'à orienter le télescope de façon à rendre les coordonnées de pointage du télescope identiques à celles de la cible. C'est grosso-modo ce que font les aides au pointage du commerce. De nos jours, l'électronique et la mécanique ont considérablement évolué. L'éléctronique qui demandait, il y a 20 ans, de concevoir un circuit imprimé supportant de nombreux composants peut maintenant se résumer à un microcontôleur et quelques éléments annexes d'entrées et sorties. Il faut cependant programmer le microcontrôleur, ce qui est assez simple en général, et un peu plus compliqué dans le cas présent. Côté mécanique, l'impression 3D se démocratise et correspond bien au besoin de celui qui veut faire de petites pièces de toutes sortes sans investir dans un tour à métaux, une perceuse à colonne, une fraiseuse, etc.. Là encore, il faut se familiariser avec un logiciel de CAO. C'est également l'affaire d'un peu de temps vite rentabilisé. Le matériel utilisé
|
|||||||||||||||||||||
Calcul des démultiplications
|
|||||||||||||||||||||
La précision de pointage attendue est de queqlues minutes de degré sur les 2 axes, de façon à trouver les objets dans un oculaire à faible grossissement ou sur un capteur d'APN. Déclinaison L'encodeur permet de détecter 504 x 4 = 2016 impulsions par tour, soit 2016 impulsions pour 360°. Une précision de 5' est retenue soit un nombre d'impulsions de 360 x 60 / 5 = 4320 par tour. Le rapport de démultiplication est 4320 / 2016 = 2.142857 Ascension droite Dans ce cas, 2016 impulsions correspondent à 24 heures ou 1440 minutes. Actuellement, j'ai choisi (pour diverses raisons dont la longueur de la courroie synchrone dont je dispose) une résolution de 1/4 de minute mais un affichage arrondi à la minute. Le rapport de démultiplication est donc de 1440 x 4 / 2016 = 2.857143
Le montage éléctronique
Un afficheur lumineux à 4 lignes de 20 caractères est connecté par le bus I²C. Ceci nécessite 4 fils de connexion (+5V, GND, SDA et SCL) Le schéma de cablage est le suivant : 
 Le logiciel Il est développé dans l'IDE Arduino (Environnement de Développement Intégré). Il est nécessaire de télécharger les librairies LiquidCrystal_I2C et avr/pgmspace pour la gestion de l'afficheur et de la mémoire programme. Les 2 canaux de chaque encodeur sont reliés aux entrées 2, 3 et 18, 19. Ces entrées sont déclarées comme "interruptions", c'est à dire que, dès qu'apparait un changement d'état sur ces broches, le programme principal est interrompu pour exécuter un sous-programme particulier. Une des limitations pour cette application est l'introduction des différents catalogues d'objets. D'une part, il faut se limiter à un nombre d'objets "raisonnable" et d'autre part, il n'est pas possible de tout mettre dans la zone de mémoire SRAM (zone des variables). Une grosse partie, ou la totalité des listes d'objets doit etre placée en mémoire programme (FLASH) ce qui complique légèrement le programme. Dans le premier cas, on gère les éléments par un index dans un tableau, dans l'autre par un pointeur dans la mémoire. Diverses listes d'étoiles et d'objets ont été téléchargées en mode texte puis retravaillées à l'aide d'un tableur et/ou d'un éditeur de texte. (Ce remaniement est très égoïste puisque je l'ai fait en fonction du diametre de mon télescope, de la latitude où je me trouve et de la pollution lumineuse de mon site d'observation).
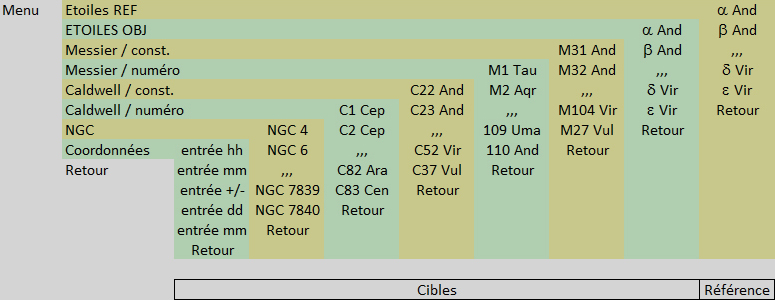
La navigation est donc simplifiée au maximum : bouton poussoir pour validation et potentiomètre pour défilement des listes
Conclusion Le but fixé est à peu près atteint. Ce système de pointage simplifié m'a permis de trouver quelques cibles facilement et rapidement lors d'un test. L'amélioration prévue sur l'Ascension Droite devrait finaliser le projet. Ce système est conçu pour une monture équatoriale correctement mise en station. Voilà donc une aide qui devrait s'avérer précieuse pour profiter un peu plus des quelques nuits claires à venir.
|
|||||||||||||||||||||
| Version Améliorée
| |||||||||||||||||||||
|
Comme mentionné un peu plus haut, la sélection des items dans les catalogues est fait par l'intermédiaire d'un potentiomètre. La sélection n'est pas toujours facile et on rencontre une limitation dans la longueur de la liste du fait de la conversion sur 10 bits. Le remplacement du système à base de potentiomètre par un encodeur rotatif résoud ces problèmes. | |||||||||||||||||||||
| |||||||||||||||||||||
Les 2 canaux (CLK et DT) sont connectés respectivement aux broches 10 et 11 et le bouton poussoir est connecté à la broche 8. Le nouveau schéma de cablage est le suivant :  ; ;
La faible résolution de l'encodeur est idéale pour naviquer sur les listes courtes (Menu, liste Caldwell ou Messier) mais nécessiterait énormément de tours pour parcourir le catalogue NGC. C'est là qu'intervient le bouton poussoir. Le logiciel passe à un défilement accéléré 10x après l'appui sur le bouton. Un nouvel appui permet de revenir au défilement à vitesse normale. Une autre amélioration a été d'ajouter :
Enfin, la courroie commandée est arrivée et le pignon de 100 dents a été imprimé et monté sur l'axe d'ascension droite.
|
|||||||||||||||||||||
| |||||||||||||||||||||











.jpg)